- トップ >
- データベース(職業能力開発支援情報) >
- 専門課程・応用課程課題情報検索 >
- 課題情報を検索する >
- 課題の要約
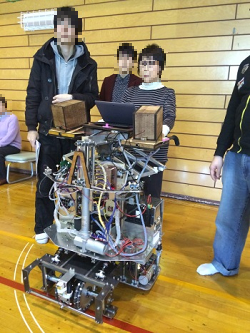
歩行補助機能を有する誘導ロボットの開発 ?人にやさしいロボットの制御?(H27)
| 大学校及び設置科 | 北海道職業能力開発大学校 生産システム技術系共同開発 |
|---|---|
| 課題実習の前提となる科目または知識、技能・技術 | 設計,CAD,ギアボックス,球駆動,オムニホイール?,保護回路,充放電回路,並列マイコン,超音波センサ |
| 課題に取り組む推奨段階 | 応用課程2年 |
| 課題によって養成する知識、技能・技術 | ヒューマンスキル,コンセプチュアルスキル,ユニバーサルデザインの評価方法, マンマシーンインターフェースの評価方法(体幹の加速度,心電) |
製作の目的と概要
★技能・技術習得目標:
ユニバーサルデザインを意識したものづくりを行います.新しい技術の導入にチャレンジします.利用者に対して,主観的かつ客観的に使いやすさ・安全・安心を評価します.
成果
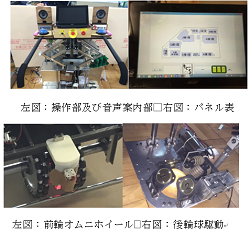
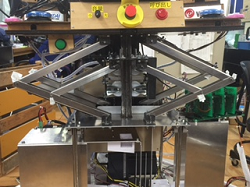
歩行補助をしながら人を誘導するロボットは現存しないので,人とロボットの立ち位置・動き・関わり合い等を予備実験によって調査し,機構(球駆動とオムニホイール?のハイブリッド機構)及びそれを制御(24コアの並列マイコンXMOSを使用)するソフトウェアにて実現する誘導ロボットを製作しました.
誘導ロボットが安全・安心で「使いやすい」を評価するために客観的評価手法と主観的評価手法を用いました.客観的評価には,心電図から求めたLF/HFと体幹の3軸加速度の値を複合的に用いて評価しました.主観的評価には,ユニバーサルデザインのPPP評価手法を用いました.
その結果,課題は残しながらも高齢者2名と高齢者疑似体験教材を着用した学生4名が,安全・安心で使いやすいとする結果を示すことができました.
★アピールポイント:
共同開発企業と共に札幌モーターショー2016へ出展しました.
ライフサーポート学会フロンティア講演会にて成果発表を行っています.
ポリテックビジョンにて「ものづくり大賞」を受賞しました.