- トップ >
- データベース(職業能力開発支援情報) >
- 専門課程・応用課程課題情報検索 >
- 課題情報を検索する >
- 課題の要約
マイクロマシン加工機の開発(H27)
| 大学校及び設置科 | 東北職業能力開発大学校 生産システム技術系共同開発 |
|---|---|
| 課題実習の前提となる科目または知識、技能・技術 | 機械設計、複合電子回路設計、ソフトウェア制作実習、オペレーティングシステム |
| 課題に取り組む推奨段階 | 応用課程2年 |
| 課題によって養成する知識、技能・技術 | 企画・構想、CAD設計、加工工程の検討、自動化設計、センサ技術、モータ制御、情報通信技術、電子基板・回路設計、システムプログラミング技術 |
製作の目的と概要
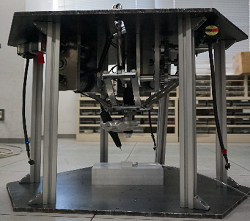
本課題では「微細な形状を自由に」「広範囲に精度良く」加工でき、「工具・ハンドの交換を容易に」して対象物も変えられる応用システムの基礎技術開発ため【マイクロマシン加工機】を開発することとしました。
★技能・技術習得目標:
ロボットテクノロジーに代表される3つの技術要素(「センサ」、「制御系」、「駆動系」)の習得度を高めます。また生産システムを制御する能力(システムインテグレータ)や開発の進め方(企画・構想)を理解し、コミュニケーション、課題解決力を高めます。
成果
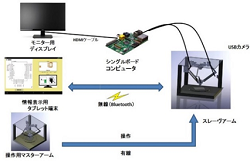
パラレルリンクロボットの順運動学、逆運動学を分析してプログラム開発を行ったことで、あたかも直接作業できているような使用感を実現できました。手元の1mmの動きを1μmの精度で動かすことができます。
★アピールポイント:
ポリテックニクビジョンでシステムを展示したことによって、企業からの来場者から高い評価を受けました。また高校訪問(とくに普通科)や地域展示会への出展によって大学校の魅力が広く伝わることが期待できます。