- トップ >
- データベース(職業能力開発支援情報) >
- 専門課程・応用課程課題情報検索 >
- 課題情報を検索する >
- 課題の要約
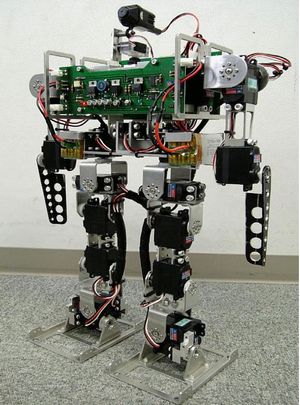
知能情報二足歩行ロボットの開発(H18)
| 大学校及び設置科 | 四国職業能力開発大学校 生産システム技術系共同開発 |
|---|---|
| 課題実習の前提となる科目または知識、技能・技術 | ◆機械技術 機械設計、機械加工、自動化機器 ◆電気・電子技術 コンピュータシステム技術、電気機器、センサ工学、制御工学,インターフェース技術、計測制御システム構築 ◆情報技術 インターフェース設計制作実習、リアルタイムシステム構築実習、計測制御システム構築、画像計測システム構築実習 |
| 課題に取り組む推奨段階 | ◆機械技術 ◆電気・電子技術 マイコン技術、センサ技術、モーター制御、フィードバック制御などを習得した段階 ◆情報技術 組み込み技術、画像処理技術、図形処理技術、音声認識などを習得した段階 |
| 課題によって養成する知識、技能・技術 | ◆機械技術 自動機の開発を通して、設計、製作及び組立・調整等の総合的な実践力を身に付ける ◆電気・電子技術 マイコン技術、センサ技術、モーター制御、フィードバック制御 ◆情報技術 組込み技術、画像計測、3Dグラフィックス、音声認識 |
製作の目的と概要
成果
2006年度には、さらに軽量化をすすめるとともに、知能情報化を進めて、ホストコンピュータと無線通信しながらマイクからの音声指示による操作や人の手指の画像認識による動作指示が可能なロボットが完成しました。