- トップ >
- データベース(職業能力開発支援情報) >
- 専門課程・応用課程課題情報検索 >
- 課題情報を検索する >
- 課題の要約
産業用ロボット及びPLC制御実習教材の作成(H27)
| 大学校及び設置科 | 港湾職業能力開発短期大学校 横浜校 港湾流通科 |
|---|---|
| 課題実習の前提となる科目または知識、技能・技術 | 物流機械工学概論、電気・電子概論、電気・電子機器実習、基礎工学実験 |
| 課題に取り組む推奨段階 | 専門課程2年 |
| 課題によって養成する知識、技能・技術 | 自動機器制御法、プログラミング、トラブルシューティング |
製作の目的と概要
また、学生の立場に立った実習教材テキストを作成することにより、難解なプログラミング、理解しづらい課題等を抽出でき、より詳しい説明・解説が付加できるようになります。学生にとって、いままで実際に触れたことのない自動機の概要等がより理解しやすくなります。
★技能・技術習得目標:
課題を通して、港湾における自動化の現状、実際の実習装置ではPLCの基本プログラミング、産業用ロボットのロボット言語を使用したプログラミング、トラブル発生時の対処法を習得します。
成果
「多能工」とは、1人のオペレータが複数工程の作業をこなせるようになることです。これにより生産負荷の低い工程から高い工程へ人員を柔軟に移動させ負荷の平準化を常に行うことができるようになります。さらに、1人で複数台の機械を受け持つことが工程の少人化を可能にします。
今回は、三菱電機製の産業用ロボット及びプログラマブル・ロジック・コントローラ(以下PLC)を使用して機械の制御法を理解することができます。この産業用ロボットで使用されているプログラム言語は、ムーブマスター?言語およびMELFA BASIC言語の2種類あり双方の言語でプログラムが作成できるようにテキストを工夫しました。はじめて産業用ロボットに触れる人が、機械操作からプログラム作成・編集、停止した場合のトラブルシューティングまで一連の操作を網羅しています。
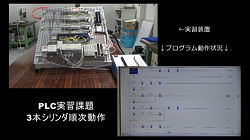
PLCは、授業においてラダープログラミングを習得するため、LD(Load)、LDI(Load Inverse)And、Notなどの基本命令からはじまり、課題を通し実習することにより3本シリンダの順次動作制御までできるものとしています。
★アピールポイント:
当校に入学する学生は文系の学生が多く、機械に触れたことが無い者も多く見受けられます。その学生が産業用ロボットや空気圧機器、さらにPLC等を学習する際のサブテキストとなるよう、わかり易く解説をしながら課題が進められるように工夫しています。一例を挙げると、PLCで使用されているラダープログラム命令は、基本命令の使い方からはじまり実際に空気圧機器を制御する場合にはどのような流れでプログラムを組んでいけばよいのか例文を挙げながら、また、前のページに戻り再学習をすることでより簡便にプログラムの作成ができるようにしています。