- トップ >
- データベース(職業能力開発支援情報) >
- 専門課程・応用課程課題情報検索 >
- 課題情報を検索する >
- 課題の要約
音楽ロボットの開発 −リコーダ三重奏ロボットによる音楽空間の制御−(H18)
| 大学校及び設置科 | 四国職業能力開発大学校 生産システム技術系共同開発 |
|---|---|
| 課題実習の前提となる科目または知識、技能・技術 | ◆機械技術 機械設計、機械加工 ◆電気・電子技術 空気圧制御、アクチュエータドライブ回路、MIDI信号デコーダ ◆情報技術 ネットワークシステム構築実習、画像計測システム構築実習、インタフェース設計製作実習 |
| 課題に取り組む推奨段階 | ◆機械技術 ◆電気・電子技術 モーター制御、センサ技術などを習得した段階 ◆情報技術 |
| 課題によって養成する知識、技能・技術 | ◆機械技術 自動機の開発を通して、設計、製作及び組立・調整等の総合的な実践力を身に付ける ◆電気・電子技術 演奏ロボット、計測制御 ◆情報技術 制御プログラム、画像計測 |
製作の目的と概要
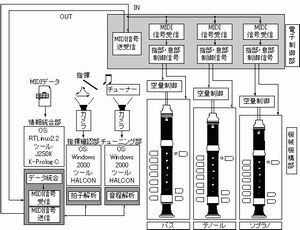
そこで、本課題では、完成度の高い演奏ロボットの実現を目指し、昨年度から継続して同テーマに取組むことにしました。昨年度は、リコーダ二重奏でのシステム動作確認及び息の制御にふいごを使用した場合の問題点を抽出しました。本年度はそれらの問題点を解決し、指揮棒で指示されたテンポに従って、インターラクティブにリコーダ三重奏によるアンサンブルを行ないます。本ロボットの各リコーダは独立に制御され、必要に応じて同期をとる事が可能です。本課題は、三つのリコーダが作り出す音楽空間を、人間が指揮をおこない、リアルタイム制御を可能とするマン・マシンインタフェースを持つシステムの構築となります。
機構的には、三種類のリコーダのリアルタイム制御を行うための実時間でON,OFFできる人間の指を擬した機構を開発・改良する一方、発音には、安定したエアーリードが必要となり、人間の息の生成をシミュレートしたふいごを使った新メカニズムの安定化の実現を考えています。
最終ゴールとしては、いかに感情の込められた人間的な演奏に迫れるかが目標となります。感情表現をいかに演奏情報として反映させるか、またそれを可能にする指と息の連携機構をどう実現するかもポイントとなります。使用するリコーダは既製品を購入し、楽器そのもには一切手を加えないものとしました。
成果
今回の課題では、性能評価曲として、バッハのインベンションを用いました。部分的には原曲のメロディの雰囲気を奏でるフレーズもありましたが、指の機械的な加工精度の問題により、全部の指を閉じたときの最低周波数共鳴音が出ない場合がありました。この最低音は聴覚上また作曲上において基音として非常に重要になるため、原曲と大きく異なる印象を与える原因となりました。この問題は指機工の再設計により、下位2孔のダブルトーンホール機構の精度を上げれば解決可能と思われます。人間の情感に訴える演奏になるまでには、まず楽譜に忠実な演奏を実現する必要がありますが、そのために解決すべきいくつかの課題が明確になりました。
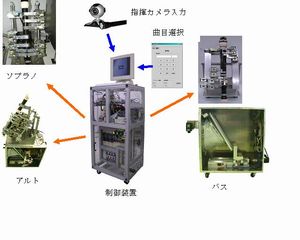
図1にシステム構成図、図2にシステム構成写真を示します。