- トップ >
- データベース(職業能力開発支援情報) >
- 専門課程・応用課程課題情報検索 >
- 課題情報を検索する >
- 課題の要約
災害救助用走行ロボの設計・製作(H28)
| 大学校及び設置科 | 北陸職業能力開発大学校 電気エネルギー制御科 |
|---|---|
| 課題実習の前提となる科目または知識、技能・技術 | 電子回路工学Ⅰ、Ⅱ、機械工作実習、CAD実習、制御プログラミング、制御プログラミング実習、機械工学概論Ⅰ、Ⅱ |
| 課題に取り組む推奨段階 | 専門課程2年 |
| 課題によって養成する知識、技能・技術 | 電気回路設計、電子回路設計、マイコンプログラミング、用途に応じた材料選定、 CAD設計、レーザー加工などの機械加工技術 |
製作の目的と概要
ものづくりの流れとしての「コンセプト」「実験」「設計」「試作」「改良」「本作」をしっかりと押さえ、その手順をしっかり理解することを目的としました。
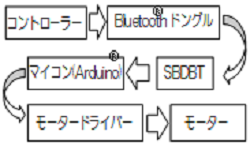
作る題材は遠隔操作可能な走行ロボとしました。4つのモータで左右のクローラ、及びフリッパーアームを回転させ、誰にでも簡単に操作できる機器として完成させることとしました。
★技能・技術習得目標:
「製品開発」の考え方、「部品」の加工精度、「組立」の調節調整、「制御」のプログラミングについて、実体験するとともに、納期管理の重要性を認識します。
成果
初期コンセプトをほぼ達成する走行ロボを作成することができました。
ハードウェア、ソフトウェアを含めた総合的な技術力を身につけることができ、それを活かした機器の設計、試作、テスト運転、改良と一連の流れを学ぶことができました。
★アピールポイント:
作成した機器には以下のような特徴を持たせることができました。
① 汎用のゲームコントローラにて遠隔無線操作ができます。
② ある程度の不整地や段差もクローラおよびフリッパーアームにて走破することができます。