- トップ >
- データベース(職業能力開発支援情報) >
- 専門課程・応用課程課題情報検索 >
- 課題情報を検索する >
- 課題の要約
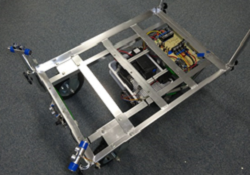
自動追従運搬ロボットの製作(H28)
| 大学校及び設置科 | 四国職業能力開発大学校 電気エネルギー制御科 |
|---|---|
| 課題実習の前提となる科目または知識、技能・技術 | センサ工学、電子回路基礎実験、電子工学基礎実験、機械工作実習、制御プログラミング実習、自律型ロボット製作実習 |
| 課題に取り組む推奨段階 | 専門課程2年 |
| 課題によって養成する知識、技能・技術 | 制御プログラミング技術、モータ制御技術、センサ活用技術、電子回路設計技術 |
製作の目的と概要
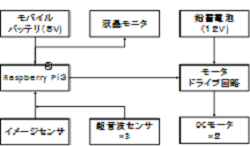
本課題では、校内で使える自動追従運搬ロボットを製作することにより、センサの活用技術とモータ制御技術の習得を目的としています。
★技能・技術習得目標:
課題を通して、イメージセンサと超音波センサを用いたモータ制御技術を習得します。
成果
★アピールポイント:
学内で展示会を開催した時には、実際に載せるものの重量をかえて動かしたり、イメージセンサに登録していない人が近づいた場合に衝突しないように停止することなどを確認して、実用性があることをアピールしていました。