- トップ >
- データベース(職業能力開発支援情報) >
- 専門課程・応用課程課題情報検索 >
- 課題情報を検索する >
- 課題の要約
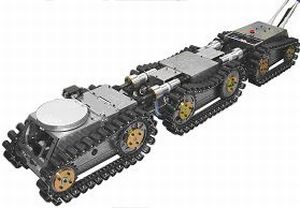
探索用レスキューロボットの開発(H18)
| 大学校及び設置科 | 東北職業能力開発大学校 生産システム技術系共同開発 |
|---|---|
| 課題実習の前提となる科目または知識、技能・技術 | ◆機械技術 機械設計、機械加工、自動化機器 ◆電気・電子技術 ドライバ回路、モニタリング回路の設計・製作 ◆情報技術 ネットワークシステム構築実習、画像計測システム構築実習、インタフェース設計製作実習 |
| 課題に取り組む推奨段階 | ◆機械技術 NC工作機械による加工、3次元CADによる機械設計などを習得した段階 ◆電気・電子技術 モーター制御、センサ技術などを習得した段階 ◆情報技術 無線LAN構築技術などを習得した段階 |
| 課題によって養成する知識、技能・技術 | ◆機械技術 ロボットの開発を通して、機械設計、製作及び組立・調整等の総合的な実践力を身に付ける ◆電気・電子技術 ロボットの開発を通して、電子設計、基板製作及び組立・調整等の総合的な実践力を身に付ける ◆情報技術 ロボットの開発を通して、制御アルゴリズム、制御プログラミング及び無線LAN構築等の総合的な実践力を身に付ける |
製作の目的と概要
成果
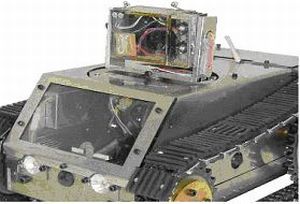
駆動は不整地走行を可能とするクローラ方式で前部車体をすべりねじ機構とユニバーサルジョイントで上下左右に傾け姿勢を制御します。図2に探索用カメラ部を示します。探索用カメラは走行中は前部車体に格納されていますが、探索時には上部カバーを上げて上昇し、360度回転させて被災者を探索します。カメラからの画像はパソコンへ送信され赤外線センサーや音などの情報と組み合わせて被災者を発見します。