- トップ >
- データベース(職業能力開発支援情報) >
- 専門課程・応用課程課題情報検索 >
- 課題情報を検索する >
- 課題の要約
多関節ロボットを活用したバリ取りシステムの開発(H29)
| 大学校及び設置科 | 北陸職業能力開発大学校 生産システム技術系共同開発 |
|---|---|
| 課題実習の前提となる科目または知識、技能・技術 | 未入力 |
| 課題に取り組む推奨段階 | 応用課程 |
| 課題によって養成する知識、技能・技術 | 開発過程において、まず学生は本システムの開発依頼元企業を訪問しました。そこで、積極的に依頼内容を聴き、質問し、意見を出しました。その前段階として、多忙な企業の方に時間を取ってもらうということを意識し、無駄のない訪問をするために事前に主題(テーマ)を研究し、質問や自分たちの意見を十分に集約し、会議に臨みました。この時点で、学生たちはコミュニケーションをしっかりと取り始めました。したがって、以降の課題が進むにつれて発生する問題点を早期に話し合いで解決する方策を得ました。開発課題の時間の始まりの会議(ミーティング)ではその日の予定を全員で確認し合い、終わりの会議(ミーティング)ではその日の成果を提示し合うなど、進捗管理もきちんと行っていました。結果、学生のヒューマンスキルは、予想以上に向上しました。 他方、多関節ロボットによるバリ取りは、当該企業のロボット講習に参加したこともあり、順調に進みました。被削材 (バリを取るべき母材) を固定するバイス、交換する工具を固定するツールステーション、加工用モータとスピンドル、カメラと照明などを固定する先端ユニットの開発・設計・製作を行いました。ロボット言語でロボットを制御し、パソコンからその動作を管理・監視し、写真を撮ってバリの状態を確認するシステムも構築しました。そのため、ネットワークプログラミングや画像処理技術も身に付けることができました。 |
製作の目的と概要
本開発では既存システムを改良し、ロボットによるバリ取り性能を向上させるシステムの開発を行います。開発過程において、学生には市場調査、題材設定(システムの優位性)、製作・改善過程におけるコミュニケーション(進捗管理・学生のフォローアップ)に取り組ませ、ヒューマンスキルの向上に努めます。
成果
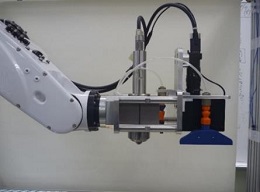
他方、多関節ロボットによるバリ取りは、当該企業のロボット講習に参加したこともあり、順調に進みました。被削材 (バリを取るべき母材) を固定するバイス、交換する工具を固定するツールステーション、加工用モータとスピンドル、カメラと照明などを固定する先端ユニットの開発・設計・製作を行いました。ロボット言語でロボットを制御し、パソコンからその動作を管理・監視し、写真を撮ってバリの状態を確認するシステムも構築しました。そのため、ネットワークプログラミングや画像処理技術も身に付けることができました。
本開発では、多関節ロボットの優位性を十分に活かしたシステムが出来上がったと自負しています。その優位性は、ロボットの汎用性にあり、先端ユニットを目的に合わせて交換すれば容易に目的を達成できることにあります。先端ユニットは、①バリ取り加工、②切粉除去、③Z軸測定、④カメラ撮影 の4機能を持った装置です。この4機能を一台のロボットで熟せることがまさに多関節ロボットの優位性を発揮した結果だと言えます。
学生たちも自分たちの専門分野を極めながら、他科の知識を吸収しました。それは、自分たちの専門分野だけでは製品は成り立たない、開発を進められないことを理解したからです。ポリテックビジョンでは、来賓の見学時に自信を持って説明し、その内容をご理解いただけました。