- トップ >
- データベース(職業能力開発支援情報) >
- 専門課程・応用課程課題情報検索 >
- 課題情報を検索する >
- 課題の要約
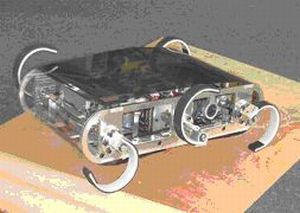
救助用多足型歩行ロボットの開発(H18)
| 大学校及び設置科 | 北海道職業能力開発大学校 生産システム技術系共同開発 |
|---|---|
| 課題実習の前提となる科目または知識、技能・技術 | ◆機械技術 機械設計、機械加工、自動化機器 ◆電気・電子技術 アクチュエータドライブ回路、センシング回路技術 ◆情報技術 ネットワークシステム構築技術、画像計測システム構築実習、インタフェース設計製作実習 |
| 課題に取り組む推奨段階 | ◆機械技術 機械設計、機械加工の基礎を習得した段階 ◆電気・電子技術 モーター制御、センサ技術、回路設計・実装の基礎を習得した段階 ◆情報技術 ネットワーク環境構築、無線通信、制御/通信プログラムの基礎を習得した段階 |
| 課題によって養成する知識、技能・技術 | ◆機械技術 機構の設計、各構成部品の加工及び組立・調整等の総合的な実践力 ◆電気・電子技術 マイコンおよびインターフェース回路の設計、実装技術、マイコンプログラム開発 ◆情報技術 無線LAN、画像計測、音声認識、制御・GUIプログラム開発 |
製作の目的と概要
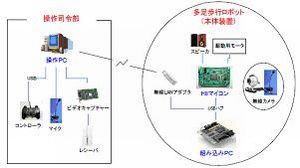
ロボットには、無線LANによる通信のための組込PCと、ロボット制御を行うマイコンを搭載しています。
成果
また、画像や音声の伝送も行え、無線通信による活動範囲は、操作司令部を中心に約30mであることなどが確認でき、計画した機能をほぼ実現できました。
また、狭く暗い現場での走行には、照明装置の具備や、無線通信の安定性、足歩行の問題などが改善点として残されました。