- トップ >
- データベース(職業能力開発支援情報) >
- 専門課程・応用課程課題情報検索 >
- 課題情報を検索する >
- 課題の要約
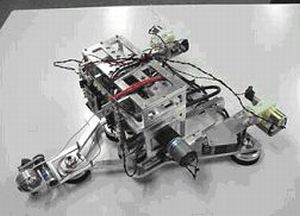
壁歩行ロボット4号機の開発(H18)
| 大学校及び設置科 | 北海道職業能力開発大学校 生産システム技術系共同開発 |
|---|---|
| 課題実習の前提となる科目または知識、技能・技術 | ◆機械技術 機械設計、機械加工、自動化機器 ◆電気・電子技術 コンピュータシステム技術、電気機器、インターフェース技術、計測制御システム構築 ◆情報技術 インターフェース設計制作実習、リアルタイムシステム構築実習、計測制御システム構築 |
| 課題に取り組む推奨段階 | ◆機械技術 設計、機構設計、機械加工、力学を習得した段階 ◆電気・電子技術 マイコン技術、空圧機器、モーター制御、通信技術などを習得した段階 ◆情報技術 組込み技術、通信技術などを習得した段階 |
| 課題によって養成する知識、技能・技術 | ◆機械技術 自動機の開発を通して、設計、製作及び組立・調整等の総合的な実践力を身に付ける ◆電気・電子技術 マイコン技術、空圧機器、モーター制御 ◆情報技術 組込み技術、ネットワークプログラム、制御プログラム |
製作の目的と概要
本ロボットは、平成15年から開発・製作を実施しており、本4号機においては、以下の点を目標としました。
・1連の歩行動作をスムーズにすること
・コンクリート外壁面での移動を可能にすること
・細かい歩行動作を可能にすること
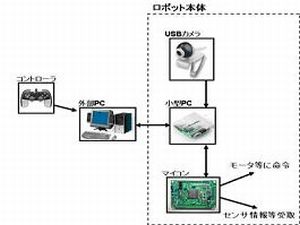
・操作用PCと小型PC間を無線化すること
成果
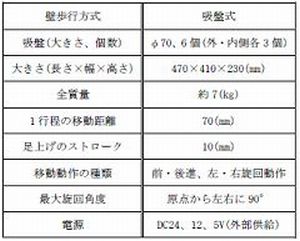
4号機においては、回転時に安定性をもたせるために基本形状、構造を三角形にしました。また吸盤を外側・内側に各3個づつ取りつけることや真空圧の大きいポンプを使用することにより、ロボットの吸付き力を大きくしました。
3号機では吸盤を擦ったまま移動し、吸盤を押し付ける動作もないため脱着がうまくいきませんでした。このことから、4号機では、本体に足上げ機構を追加し、吸盤を擦らず移動・回転でき脱着も確実に行えるようにしました。これらの改良によりコンクリート外壁面での歩行動作が可能になりました。
制御においては、プログラムを改良することで、ストローク内であれば自由な位置で停止させることが可能になり、細かい歩行動作が可能になりました。 尚、本ロボットのシステム構成を、図2に示します。