- トップ >
- データベース(職業能力開発支援情報) >
- 専門課程・応用課程課題情報検索 >
- 課題情報を検索する >
- 課題の要約
シーソーの安定化制御システムの製作(H19)
| 大学校及び設置科 | 東北職業能力開発大学校 附属青森職業能力開発短期大学校 制御技術科 |
|---|---|
| 課題実習の前提となる科目または知識、技能・技術 | 安全衛生、NC機械加工、測定、材料、力学、設計・製図、センサ、デジタル回路、マイコン、Cプログラム |
| 課題に取り組む推奨段階 | 機械設計製図及び機械加工実習、機械制御、メカトロニクス、Cプログラム終了後 |
| 課題によって養成する知識、技能・技術 | 課題を通して、主にメカトロニクス設計及び機械制御マイコン技術の実践力を身に付ける。 |
製作の目的と概要
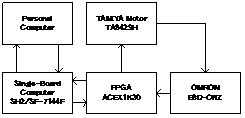
本システムの製作で特に留意したことは以下の5点です。
・FPGAを使うこと。
・安価な直流モータを使うこと。
・シーソーの機構部は、NC加工機を用いて自作すること。
・簡単な制御則を使うこと。
・システムの応答を記録し、グラフ化できること。
成果