- トップ >
- データベース(職業能力開発支援情報) >
- 専門課程・応用課程課題情報検索 >
- 課題情報を検索する >
- 課題の要約
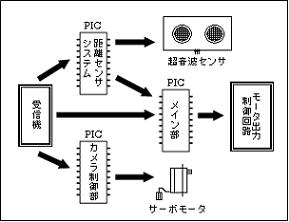
災害時用、情報収集飛行船型ロボットの制作(H19)
| 大学校及び設置科 | 東北職業能力開発大学校 附属青森職業能力開発短期大学校 情報技術科 |
|---|---|
| 課題実習の前提となる科目または知識、技能・技術 | ソフトウェア制作実習、ディジタル工学実習、計算機命令実習、計測制御実習 |
| 課題に取り組む推奨段階 | ソフトウェア制作実習、ディジタル工学実習、計算機命令実習、計測制御実習 習得後 |
| 課題によって養成する知識、技能・技術 | プログラム設計・製作、マイコン上の開発、モータ制御技術、無線通信技術 |
製作の目的と概要
成果