- トップ >
- データベース(職業能力開発支援情報) >
- 専門課程・応用課程課題情報検索 >
- 課題情報を検索する >
- 課題の要約
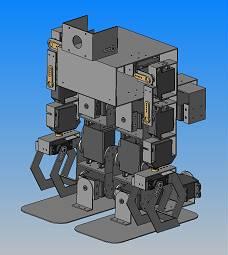
二足歩行ロボットの設計・製作・制御(H19)
| 大学校及び設置科 | 九州職業能力開発大学校 附属川内職業能力開発短期大学校 制御技術科 |
|---|---|
| 課題実習の前提となる科目または知識、技能・技術 | 力学、安全衛生、設計・製図、測定、機械加工、ディジタル回路、マイコン制御 |
| 課題に取り組む推奨段階 | メカニズム、インターフェース実習、マイコン制御実習終了後 |
| 課題によって養成する知識、技能・技術 | 3次元CAD設計による設計、設計製図、機械加工と組立技術、制御の実践力を身につけます。 |
製作の目的と概要
成果
なお、動作確認用に簡単的な手動コントロールボックスも製作しました。
安定歩行をさせるには、片方の足を上げた時、反対側の足裏内にZMP(Zero Moment Point)が存在しなければならないので足裏はできるだけ大きく設計しました。ZMPは歩行するロボットの重力と慣性力によって発生するモーメントの合計がゼロになる床上の点です。この重力と慣性力の合成ベクトルの先端が、必ずロボットの足裏範囲内に保つように制御する必要があります。
課題としては、今回の歩行ロボットが静歩行のみしかできないため、動歩行をさせるために剛性強度を上げる形状を工夫することや姿勢制御用センサの取り付けを考慮した設計にすることです。また、高度な姿勢制御を実現するため映像処理と画像認識への分野開拓を行う必要があると考えています。