- トップ >
- データベース(職業能力開発支援情報) >
- 専門課程・応用課程課題情報検索 >
- 課題情報を検索する >
- 課題の要約
自律型2足歩行ロボットの製作(H19)
| 大学校及び設置科 | 中国職業能力開発大学校 附属島根職業能力開発短期大学校 制御技術科 |
|---|---|
| 課題実習の前提となる科目または知識、技能・技術 | 安全衛生、機械加工、測定、材料、力学、設計・製図、センサ工学、マイコン制御、メカトロニクス工学 |
| 課題に取り組む推奨段階 | マイコン制御実習、センサ工学終了後 |
| 課題によって養成する知識、技能・技術 | 課題を通して、機械加工技術、電子回路製作技術およびマイコン制御技術の実践力・応用力を身に付ける。 |
製作の目的と概要
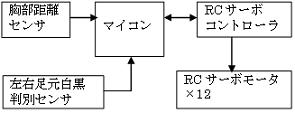
間接に相当する部分に合計12個のRCサーボモータを使っています。マイコンからRCサーボコントローラに歩行パターンデータを送ることで歩行します。センサはスタート時のゲートオープンを検知するもの(スタート後は障害物を検知する)、路面の白黒を判別するものの2つです。5.5mの平面屈曲路を5分以内で走行させることを目標にしました。
成果
マイコンのプログラムは、スタートゲートがオープンしたのを検知し歩行を開始する、路面の白黒にある程度沿って歩行する、障害物に近づいたら転回するというプログラムと歩行パターンデータをRCサーボコントローラへシリアル転送するだけのプログラムですが、そのデータとなる歩行パターンの作成に大変苦労しました。
試行錯誤の結果、毎秒約20mmで走行することができ、競技会では、ゴールまで約4分半で走行することができました。