- トップ >
- データベース(職業能力開発支援情報) >
- 専門課程・応用課程課題情報検索 >
- 課題情報を検索する >
- 課題の要約
遠隔制御システムを利用した四輪駆動車の開発(H19)
| 大学校及び設置科 | 職業能力開発総合大学校 小平キャンパス 制御技術科 |
|---|---|
| 課題実習の前提となる科目または知識、技能・技術 | 機械制御、メカニズム、電子回路、センサ技術、プログラム(C言語、Visual Basic)、ネットワーク制御 |
| 課題に取り組む推奨段階 | 機械系・電子系専門課程2年次修了後 |
| 課題によって養成する知識、技能・技術 | 遠隔制御システムの構築、機器の選定、回路設計、プログラム開発の実践力を身につける |
製作の目的と概要
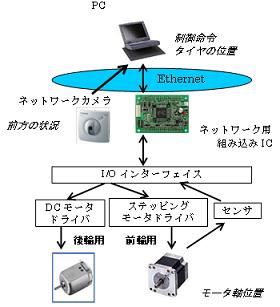
本制作実習では、この点に着目しEthernetを活用した電気機器の制御システムを構築する技能を習得することを目的としました。生産現場のモデルで構築することはコスト的に不可能なことと学生にとってイメージが難しいことから、図1に示した四輪駆動式の車体としました。
成果
I/Oのインターフェイスはネットワーク組み込み用ICを応用することで、センサなどの入力とモータなどの出力管理を可能にしました。完成した装置の遠隔制御の稼動範囲について検証を行ったところ、リチウムイオン電池(2700mAH)をほぼ充分に充電したもので、室内温度約26℃、室外温度約14℃のときに制御が可能な距離は学内で80m以内、障害物がない状態で180mでした。また、稼働時間は2時間程度であるので人が立ち入ることが不可能な場所を稼動可能なロボットとしても応用できることがわかりました。