- トップ >
- データベース(職業能力開発支援情報) >
- 専門課程・応用課程課題情報検索 >
- 課題情報を検索する >
- 課題の要約
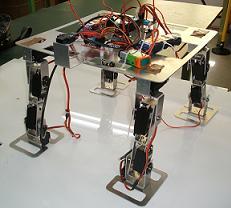
競技会用自律歩行型ロボットの製作(H19)
| 大学校及び設置科 | 中国職業能力開発大学校 附属福山職業能力開発短期大学校 制御技術科 |
|---|---|
| 課題実習の前提となる科目または知識、技能・技術 | 安全衛生、機械加工、数値制御加工、測定、材料、力学、設計・製図、マイコン制御、電子回路 |
| 課題に取り組む推奨段階 | 数値制御加工実習及びマイコン制御実習後 |
| 課題によって養成する知識、技能・技術 | 課題を通して、モータの選定(トルク計算等)と数値制御加工実習及びマイコン制御技術の実践力を身に付ける。 |
製作の目的と概要
競技ルールの概要は、スタートゲートが開くとロボットが歩きだし、ゴールまでの歩行タイムを競う徒競争です。
この競技では、以下に示すロボット本体の構造制限があります。
1)外部からの制御が行えない完全自律型の歩行ロボットであること
2)車輪走行型でないこと
3)常時フィールドに接地面を持たないこと
4)ロボットの全高、全幅がスタートゲートを通過すること
等です。
成果
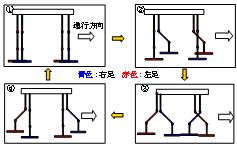
歩行パターンは、図2の通りです。このパターンの繰り返しにより、前後に歩行可能です。
また、各脚の付け根にあるモータにより、脚の方向を変えることができるため、左右にも歩行することができます。