- トップ >
- データベース(職業能力開発支援情報) >
- 専門課程・応用課程課題情報検索 >
- 課題情報を検索する >
- 課題の要約
自律動作によるワークセッティング機器の設計・製作(H19)
| 大学校及び設置科 | 北陸職業能力開発大学校 制御技術科 |
|---|---|
| 課題実習の前提となる科目または知識、技能・技術 | 安全衛生、機械加工、材料、力学、設計・製図、メカトロニクス |
| 課題に取り組む推奨段階 | 機械設計製図及び機械加工実習終了後 |
| 課題によって養成する知識、技能・技術 | 課題を通して、主にメカニズム設計、機械加工技術及び機械制御技術の実践力を身に付ける。 |
製作の目的と概要
原理的にはライントレースの動作を利用し、搬送部上に白のラインを引き、それに沿って本機を移動させ、ワーク搬入場所と搬出場所間において搬送を行わせるものです。今回の実習では、ワーク格納場所とロボット作業ステーション間でワークの搬送を実際に行わせることを課題としました。
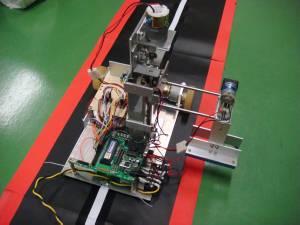
成果
実際に搬送作業を行わせたシステムの全体図を図2に示します。本システムにおいて、産業用ロボットへのワーク搬入作業を実現することができました。本機器は従来の搬送機器では対応が難しかった生産・製造ラインの修正・変更に対して、従来のように搬送機器全体を設計し直し、機器を入れ替えるというような面倒なことはせずに、搬送ライン上の床面に新たに白ラインを引きなおし、動作プログラミングの変更を行うだけで、容易に搬送作業を対応させることを可能としました。これより、本機器がコストの面においても大いに有益であることは明らかです。