- トップ >
- データベース(職業能力開発支援情報) >
- 専門課程・応用課程課題情報検索 >
- 課題情報を検索する >
- 課題の要約
二足歩行ロボットの課題研究(H18)
| 大学校及び設置科 | 関東職業能力開発大学校 附属千葉職業能力開発短期大学校 生産技術科 |
|---|---|
| 課題実習の前提となる科目または知識、技能・技術 | 安全衛生、機械加工、測定、材料、力学、設計・製図、計測・制御、電気・電子 |
| 課題に取り組む推奨段階 | ディジタル回路、機械制御、シーケンス制御、情報処理実習終了後 |
| 課題によって養成する知識、技能・技術 | 課題を通して、主にモータのPWM制御およびシーケンスプログラムの実践力を身に付ける |
製作の目的と概要
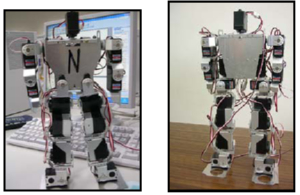
本実習では、これら要素技術の習得と深耕を目的として、二足歩行ロボットの課題研究を実施しました。
まず前半では、市販キット(近藤科学製:KHR-1)の製作・調整を行い、問題点や課題の抽出を行いました。
後半では、(1)二足歩行動作の安定化、(2)足の旋回軸(自由度)の追加、さらに(3)自律型ロボットへの挑戦を課題として、変更・改造に取り組みました。
成果
(1)二足歩行動作の安定化では、旋回軸を追加する前は歩行やサンプル動作を実現できました。旋回軸の追加後は残念ながら安定した歩行は未だ実現できていません。(2)足の旋回軸(自由度)の追加では、設計・制作・動作確認を実施し、多少のガタつきはあるものの、ほぼ思いどおりの成果が得られました。(3)自律型ロボットへの挑戦では、センサ、CPUなどの調査を実施しましたが、構想止まりで具体的な設計、制作までには至っていません。