- トップ >
- データベース(職業能力開発支援情報) >
- 専門課程・応用課程課題情報検索 >
- 課題情報を検索する >
- 課題の要約
形状認識装置の開発(H19)
| 大学校及び設置科 | 九州職業能力開発大学校 生産システム技術系共同開発 |
|---|---|
| 課題実習の前提となる科目または知識、技能・技術 | 生産情報システム技術科(安全衛生、画像処理、プログラミング、データベース構築)、生産電子システム技術科(アナログ・ディジタル回路技術、マイコン技術) |
| 課題に取り組む推奨段階 | 生産情報システム技術科(画像処理に関する基礎的技術を習得後)、生産電子システム技術科(センサデータの変換処理に関する基礎的技術を習得後) |
| 課題によって養成する知識、技能・技術 | 共同作業における企画と業務遂行能力、カメラからの画像取得、画像の管理と処理、分散システムによるネットワークシステムの構築 |
製作の目的と概要
3次元空間認識には、ステレオビジョンを用いました。これは複数のカメラによって撮影された複数の画像を用いて、3次元空間を認識するものです。複数の画像から同一の対応点を検出し、その視差から計測を行います。そのため、単眼視の場合のように、特別な条件がなくても3次元情報を得ることができます。作成したカメラ装置を図1に示します。
成果
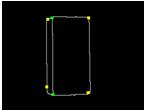
特徴点を見つけるために、物体の輪郭を検出する必要があります。輪郭検出には、2値化、エッジ抽出等の処理を行います。これにより物体の輪郭を検出します。次に、輪郭を検出した画像から、物体の特徴点を見つける処理を行います。線と線の交点、端点、線の折れ曲がった点を特徴点として検出します。(図2)最後に、各点対応付けを行い、特徴点座標をデータベースへ登録します。
カメラキャリブレーション:
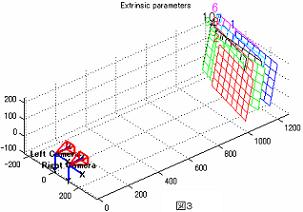
この課題では、カメラキャリブレーション用ソフトCamera Calibration Toolbox for Matlab®を使用し、カメラパラメータの検出を行いました。得られたカメラパラメータからモデル化されたステレオカメラの画像などを得ることができます。図3にカメラキャリブレーションの結果表示画像を示します。このようにカメラパラメータを抽出することで、中心点の位置、レンズ歪みなどの補正を行うことができます。