- トップ >
- データベース(職業能力開発支援情報) >
- 専門課程・応用課程課題情報検索 >
- 課題情報を検索する >
- 課題の要約
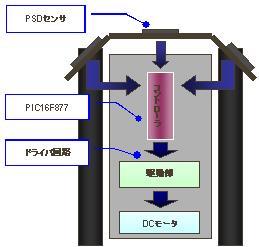
障害物回避ロボットの製作(H19)
| 大学校及び設置科 | 九州職業能力開発大学校 電子技術科 |
|---|---|
| 課題実習の前提となる科目または知識、技能・技術 | 安全衛生、マイコン制御、回路基板製作 |
| 課題に取り組む推奨段階 | 電子CAD実習及びコンピュータ工学実習?終了後 |
| 課題によって養成する知識、技能・技術 | 課題を通して、主に回路基板製作およびマイコン制御プログラムの作成技術を身に付ける。 |
製作の目的と概要
成果
今回、車体の傾斜を検出するために振動スイッチを回路中に追加することによって、動作としては障害物を回避しながら小さな段差であればスムーズに乗り越えて進むことが可能になりました。