- トップ >
- データベース(職業能力開発支援情報) >
- 専門課程・応用課程課題情報検索 >
- 課題情報を検索する >
- 課題の要約
クルーレス・ソーラーボートの製作(H19)
| 大学校及び設置科 | 近畿職業能力開発大学校 附属滋賀職業能力開発短期大学校 電子技術科 |
|---|---|
| 課題実習の前提となる科目または知識、技能・技術 | 安全衛生、制御工学、コンピュータ工学、通信工学 |
| 課題に取り組む推奨段階 | プログラミング実習、電子CAD実習、及びコンピュータ工学実習終了後 |
| 課題によって養成する知識、技能・技術 | 主にマイコンインターフェース回路設計、プリント基板製作技術、及び、制御プログラミング作成技術の実践力を身に付ける。 |
製作の目的と概要
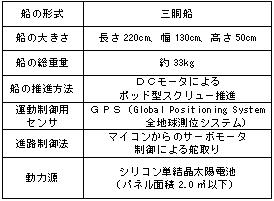
本ボートは、大会規定に従った以下の条件を満たすことを目標として製作しました。
・ソーラーパネルを動力源とする無人ボートであること
・運動制御用センサとしてGPSを搭載し、GPSの情報のみを用いてボートに組み込んだコンピュータの指令のみに基づき自律航行すること
・ラジオコントロールの手段を用いて外部から緊急停止ができること
成果
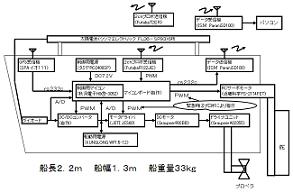
GPSから取得した現在の経度,緯度,進行方向の情報をシリアルインターフェース経由でマイコンに取り込み、目標方向との角度差を計算し舵で比例倍制御を行うことで、自動航行させました。
ラジオコントロール受信機のPWM信号のパルス幅をマイコンで計測させることで自動航行と手動航行の切り替えを行えるようにしました。また、手動航行時にはスクリュー回転速度と舵方向の制御もラジオコントロール送信機側から行えるようにしました。
ソーラーパネルのエネルギーを効率よく取り出すための最大出力点追尾装置を製作し、マイコンにて追尾制御を行いました。