- トップ >
- データベース(職業能力開発支援情報) >
- 専門課程・応用課程課題情報検索 >
- 課題情報を検索する >
- 課題の要約
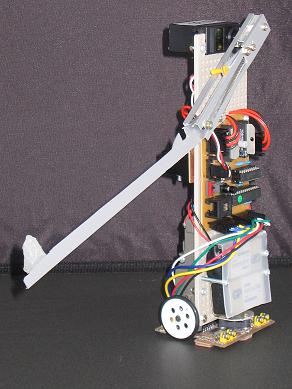
自立型競技用ロボットの製作(H19)
| 大学校及び設置科 | 東北職業能力開発大学校 電子技術科 |
|---|---|
| 課題実習の前提となる科目または知識、技能・技術 | 電子回路(アナログ、ディジタル)、センサ工学、プログラミング(アセンブラ、C言語)、マイクロプロセッサ、インターフェース、電子CAD |
| 課題に取り組む推奨段階 | プログラミング実習及び電子CAD終了後 |
| 課題によって養成する知識、技能・技術 | 電子回路設計、プログラミング、プリント基板設計の実践的技術 |
製作の目的と概要
この競技は、対戦する自立型ロボットがそれぞれのフィールド上で、横置きにされたCDと同じ大きさの円盤を指定された場所へ縦置きに格納させます。格納場所にはビンゴゲームの番号が割り当てられており、相手より早くビンゴの列を完成させると勝ちとなります。製作にあたり、これまでの実習で学んだ知識と技術を実践させるために、次のような点を考慮させました。
・ロボットの小型軽量化
部品選定・レイアウトの工夫、電子回路の部品点数削減
・ロボットの量産化
プリント基板の採用、工作時の作業工数の配慮
成果
競技会のルールでは、大きさや重さの制約があるため、仕様設計の段階から厳しい条件がありました。そこで、?ロボットの基本的な動作を統一させる、?マイコンを複数用いて部品点数を削減する、?右回り用・左回り用ロボットについて、それぞれの機構や部品配置の差異を最小限に押さえる工夫をしました。
特に、円盤を取得・格納するアームは、最適な長さに伸縮させる必要があり、この機能を最適化するため、駆動回路とアーム機構の調整を何度も行いました。
また、6台のロボットを短期間で同じ品質で作り上げるため、プリント基板の設計では、?部品のハンダ付け性、?部品取付のしやすさ、?省スペース化を考慮しました。
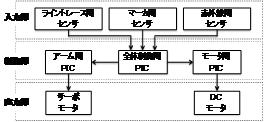
一方、ロボット全体の制御に触れますと、図2に示すようにモータごとに専用のマイコンを使用しているため、各回路部の動作を個別に改良することができました。この手法によって、制御回路の変更も大幅に低減されました。
しかし残念なことに、ロボットの活動中の姿勢が不安定であり、満足できるものではありません。全体制御用マイコンのプログラムに課題が残りました。