- トップ >
- データベース(職業能力開発支援情報) >
- 専門課程・応用課程課題情報検索 >
- 課題情報を検索する >
- 課題の要約
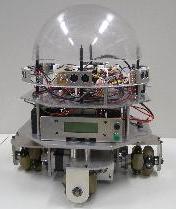
移動障害物回避ロボットの開発(H19)
| 大学校及び設置科 | 九州職業能力開発大学校 生産システム技術系共同開発 |
|---|---|
| 課題実習の前提となる科目または知識、技能・技術 | 機械系(機械加工、構造設計、測定、安全衛生)、電気電子系(回路設計、測定、プログラムとデバッグ技術、実装技術、安全衛生)、情報系(プログラム設計、プログラム開発とデバッグ、シミュレーション技術、安全衛生) |
| 課題に取り組む推奨段階 | 標準課題実習の終了後 |
| 課題によって養成する知識、技能・技術 | 回路設計と測定技術、機構設計、加工技術、ソフトウェアの開発とデバッグ技術などメカトロニクス関連技術の習得を目標とする。 |
製作の目的と概要
1.移動ロボットの搭載する距離センサは、超音波センサを使用する。
2.センサの特性を十分考慮してハードウェアを設計すること。
3.シミュレーションで回避動作アルゴリズムを検討すること。
4.アルゴリズムに基づく回避制御プログラムを組み込む。
これらの項目を考慮して、障害物の回避が可能な移動ロボットを開発します。
課題の設定
移動ロボットがゴール方向の障害物を検出して安全に回避するという当初の目標設定のために、全方向に移動できる移動ロボットを設計製作させます。
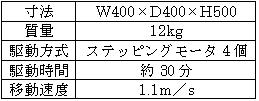
ロボットの仕様を決めるに当たっては、安価に製作することを前提としてグループで協議し仕様を決めました(表1)。距離センサは、超音波センサ、アクチュエータはステッピングモータを使うこととします。
これより移動ロボットの動作は、超音波センサで障害物を検出するとし、これらをロボットの外周に12個配置し、ステッピングモータをアクチュエータとして移動ロボットをスタート地点からゴール地点へ向かわせます。ゴール方向に検出した障害物を回避して、ロボットはゴールへ向かうものとします。
シミュレーション
ゴール方向の障害物を移動ロボットがどのような位置とセンサの検出範囲がどの程度で検出するか、検出した後どの方向に移動させるとゴール方向へ回避できるかを、移動ロボットの移動速度と障害物のそれをロボットの1/2に設定してシミュレーションさせます。
これによってセンサーレンジ内に検出する障害物に対する回避動作を決めることで、実際にその動作で回避が行われるかどうかをロボットの実験で検証します。
ロボットの設計・製作
仕様に従いロボットの筐体の設計、機構設計、センサの配置、アクチュエータの選定、コントローラの配置などを決めて機構部の設計・製作をおこないます。
センサ周辺は、センサの送受信回路を設計、制作し、特性測定および検出距離範囲を測定する実験などを行い障害物の検出装置として十分かどうか検討します。
コントローラはマイコンを使用し、センサ回路とアクチュエータドライバーとインターフェイスを取れるようにその周辺回路の設計を行います。
マイコンは、センサとアクチュエータほかの入出力信号のインターフェイス設計、ポート割り付けを行い、各部の動作確認をプログラムで行い、最後にシミュレーションで確認された動作をプログラムとしてマイコンに実装し、回避動作の確認を行います。
成果
2年目は初年度の結果を踏まえ、自律移動動作と固定障害物を確実に回避させる点に絞込み、センサでは干渉の問題を少なくするため、またセンサの信号処理を確実にするために個数を半分にし、ノイズなどの対策に時間をかけて確実な動作を得ることができました。またコントローラもPICに変更してインターフェイスの簡素化を図ってアクチュエータへの出力信号も1方向のペアモータに同一パルス信号を供給するようにしました(X、Y方向)。これによって本来の全方向移動から8方向に限定された移動方向になりましたが、固定障害物の回避では回避方向を8方向から計算で選択し、その影響を受けることなく回避動作が行えました。
実験結果ではほぼ固定障害物は回避できるようになりましたが、移動障害物については十分な実験ができる状態まで至りませんでした。したがって、本来の目標を達成できたかどうかという点においては、達成できていないと言わざるを得ません。しかし、そうであっても開発過程における技術的な問題に対処して一定の成果が得られたことは評価に値すると考えています。