- トップ >
- データベース(職業能力開発支援情報) >
- 専門課程・応用課程課題情報検索 >
- 課題情報を検索する >
- 課題の要約
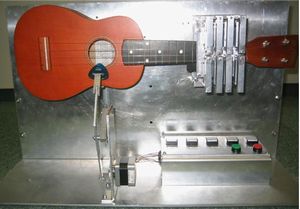
ウクレレ自動演奏ロボットの設計・製作(H18)
| 大学校及び設置科 | 中国職業能力開発大学校 附属島根職業能力開発短期大学校 制御技術科 |
|---|---|
| 課題実習の前提となる科目または知識、技能・技術 | 安全衛生、機械加工、測定、材料、力学、設計・製図、計測・制御、電気・電子 |
| 課題に取り組む推奨段階 | メカニズムおよびメカトロニクス実習終了後 |
| 課題によって養成する知識、技能・技術 | 課題を通して、主にメカトロニクスに関する実践力を身に付ける |
製作の目的と概要
本来ロボットとは、工場の自動化や人の生活を便利にするためのものが多くを占めますが、今回製作したロボットは、「人を和ませる」をコンセプトに楽器を演奏させることを目的としました。
本課題では、演奏が比較的容易で、小型・軽量という条件からウクレレを使用しています。
成果
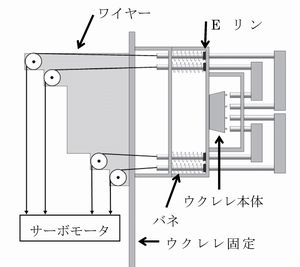
弾弦部には、「Dリンク機構」を使用し、「D」の字の縦運動部分で弦を弾き、カーブの部分で復帰します。操作方法は、コントロールボックス上の曲選択ボタンで選曲し、スタートボタンを押すと自動で曲を演奏することになります。