- トップ >
- データベース(職業能力開発支援情報) >
- 専門課程・応用課程課題情報検索 >
- 課題情報を検索する >
- 課題の要約
二足歩行ロボットの製作(H19)
| 大学校及び設置科 | 沖縄職業能力開発大学校 電子技術科 |
|---|---|
| 課題実習の前提となる科目または知識、技能・技術 | 安全衛生、プリント基板作成、マイコンプログラミング、モータ制御、センサ工学 |
| 課題に取り組む推奨段階 | C言語によるマイコン制御実習および電気機器終了後 |
| 課題によって養成する知識、技能・技術 | 課題を通して、C言語によるモータ制御の方法及び簡単な加工技術を身につけます。 |
製作の目的と概要
成果
このロボットは、下半身のみを製作しました。片足6軸、計12軸の可動部分を搭載しています。
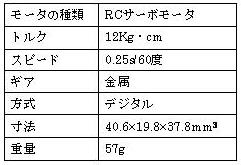
このロボットに使用したモータの特性を表1に示します。
転倒を防ぐために、あらかじめ、どのモータがどの角度でロボットの転倒を防ぐことができるかを、姿勢ごとに実測し、その角度を超えないように歩行プログラムを作成しました。
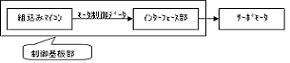
ロボットは電源を切った状態で原点を保持していないため、原点復帰をさせることが歩行させる上での重要な課題となりました。我々は、起立している状態を原点としました。そこで、歩行させる前に準備体操を行うことにより、モータが正常に動いているかを調査しつつ、原点復帰させることを考えました。
この結果、すり足型の二足歩行が可能となりました。