- トップ >
- データベース(職業能力開発支援情報) >
- 専門課程・応用課程課題情報検索 >
- 課題情報を検索する >
- 課題の要約
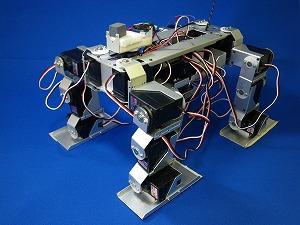
サーボモータを使用した多歩行パターンロボットの製作(H20)
| 大学校及び設置科 | 関東職業能力開発大学校 附属千葉職業能力開発短期大学校 情報技術科 |
|---|---|
| 課題実習の前提となる科目または知識、技能・技術 | ソフトウェア生産工学(実習)、制御プログラム実習、ディジタル工学(実習) |
| 課題に取り組む推奨段階 | 基礎学科、系基礎実技終了後 |
| 課題によって養成する知識、技能・技術 | 課題を通して、ソフトウェアで実際の「もの」を制御する技能と知識を身に付けます。 |
製作の目的と概要
本年度の実習課題では、そのようなロボットを製作することにより、歩行ロボットというものの構成を理解することと、歩行ロボットを用いて歩行のメカニズムを解析し、状況に応じた理想的な運動モデルについて検証することを実験の目的としました。
成果