- トップ >
- データベース(職業能力開発支援情報) >
- 専門課程・応用課程課題情報検索 >
- 課題情報を検索する >
- 課題の要約
自律型走行ロボットの試作(H20)
| 大学校及び設置科 | 東海職業能力開発大学校 附属浜松職業能力開発短期大学校 情報技術科 |
|---|---|
| 課題実習の前提となる科目または知識、技能・技術 | ソフトウェア制作実習、計測制御システム、デジタル工学 |
| 課題に取り組む推奨段階 | ソフトウェア制作実習及びデジタル工学実習終了後 |
| 課題によって養成する知識、技能・技術 | 課題を通して、マイコン利用技術の実践力を身に付けます。 |
製作の目的と概要
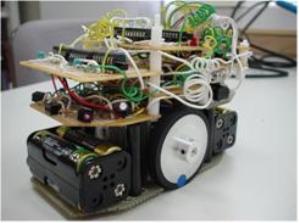
一号機は、二号機の実験機で、目的とする走行ロボットを製作するうえで必要な仕組みの理解と回路製作の練習用として製作しました。
成果
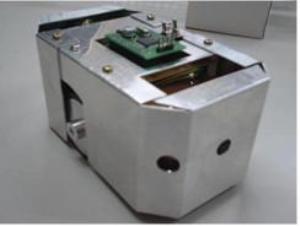
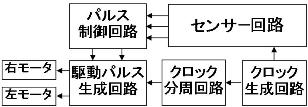
本ロボットは、赤外線センサーからの情報で走行用のステッピングモーターを制御(正回転、逆回転、停止)する形になっており、モーター用駆動パルスの生成とそのパルスの制御をハードウェア(一号機)またはソフトウェア(二号機)で実現しています。二号機のマイコンには、C言語で開発された約1kバイトの制御プログラムが実装されています。
一号機では、障害物を避けて走行し続けることはできませんが、二号機では、マイコンのプログラムの改良を重ねたことで、障害物を避けた連続走行が可能となりました。