- トップ >
- データベース(職業能力開発支援情報) >
- 専門課程・応用課程課題情報検索 >
- 課題情報を検索する >
- 課題の要約
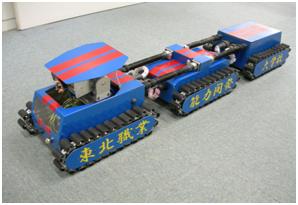
全方向レーザー距離計を装備した探索用レスキューロボットの開発(H20)
| 大学校及び設置科 | 東北職業能力開発大学校 生産システム技術系共同開発 |
|---|---|
| 課題実習の前提となる科目または知識、技能・技術 | 機械技術:機械設計、機械加工、自動化技術など生 電気・電子技術:コンピュータシステム技術、センサー応用回路技術、アクチュエータ技術など 情報技術:ネットワークシステム構築実習、画像計測システム構築実習、インタフェース設計製作実習など(課題情報シートを参照) |
| 課題に取り組む推奨段階 | 機械技術:NC工作機械による加工、3次元CADによる機械設計など 電気・電子技術:電子回路技術、メカトロニクス技術、プログラミングデバイス技術など 情報技術:無線LAN構築技術・制御プログラミング手法 などを習得した段階 |
| 課題によって養成する知識、技能・技術 | 機械技術:機械設計、製作及び組立・調整等の総合的な実践力 電気・電子技術:電子設計、基板製作及び組立・調整等の総合的な実践力 情報技術:制御アルゴリズム、制御プログラミング及び無線LAN構築等の総合的な実践力 を身に付けます。 |
製作の目的と概要
成果
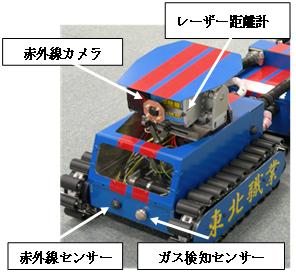
本体は3車両から構成されています。1車両目は昇降式の被災者探索用カメラとレーザー距離計ユニットと探索用赤外線センサーおよびガス検知センサーを積載しています。2車両目はユニバーサルジョイントとすべりねじ機構から構成される姿勢制御機構と姿勢制御用モータおよび駆動用モータを内蔵しています。3車両目はコントローラであるH8マイコンと遠隔操作用無線LAN装置を内蔵しています。
図2に1車両目のレーザー距離計と赤外線カメラユニットを、車体から上昇させた状態で示します。レーザー距離計と赤外線カメラは全方向パンチルト機構を持ったユニット上に平行軸上に備えられており、カメラ映像の特定位置の距離情報を読み取ることが可能となりました。