- トップ >
- データベース(職業能力開発支援情報) >
- 専門課程・応用課程課題情報検索 >
- 課題情報を検索する >
- 課題の要約
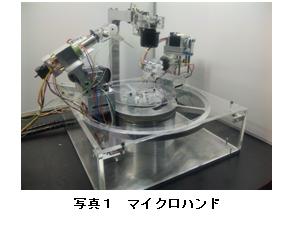
超精密加工用マイクロハンドの開発(H20)
| 大学校及び設置科 | 関東職業能力開発大学校 生産システム技術系共同開発 |
|---|---|
| 課題実習の前提となる科目または知識、技能・技術 | 機械技術:機械設計、機械加工 電子技術:電子回路設計、アクチュエータ制御、プログラム開発 |
| 課題に取り組む推奨段階 | 機械技術:応用課程2年次 電子技術:応用課程2年次 |
| 課題によって養成する知識、技能・技術 | 機械技術:設計、製作及び組立・調整などの総合的な実践力 電子技術:設計、製作及び組立・調整などの総合的な実践力 をそれぞれ身に付けるとともに、課題解決能力を養成します。 |
製作の目的と概要
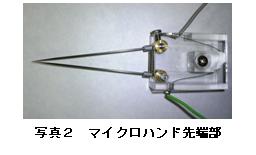
そこで我々は、過年度開発した超精密位置決め可能な三次元マイクロステージを使用して加工した、マイクロメカニズムに必要な部品の組み立てが可能なマイクロハンドを開発することにしました。100μmサイズの任意形状を保持でき、任意の場所に置くことができるマイクロハンドの製作を目標としています。写真1は今回製作したマイクロハンドで、対象物を置く回転可能なステージ部を中央に配置して、左右にハンド機構一対と上部に監視カメラ等を設けた構成としてます。
成果