- トップ >
- データベース(職業能力開発支援情報) >
- 専門課程・応用課程課題情報検索 >
- 課題情報を検索する >
- 課題の要約
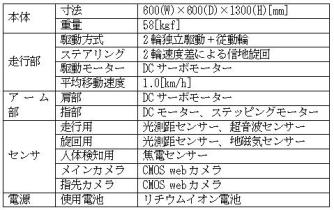
画像認識走行機能を有する多目的警備ロボットの開発(H20)
| 大学校及び設置科 | 北陸職業能力開発大学校 生産システム技術系共同開発 |
|---|---|
| 課題実習の前提となる科目または知識、技能・技術 | 共通:安全衛生、生産管理、品質管理 機械:設計・製図、CAD/CAM、機械加工、材料、力学、機構学 電子:電子回路設計製作、センサー応用、マイコンシステム設計、アクチュエーター 情報:画像処理、プログラミング、計測制御 |
| 課題に取り組む推奨段階 | 機械:機械設計製図及び精密機器製作課題実習・自動化機器製作課題実習終了後 電子:電子装置設計製作実習終了後 情報:インターフェース設計製作実習・計測制御システム構築課題終了後 |
| 課題によって養成する知識、技能・技術 | 機械:設計、CAD/CAM技術、機械加工、組立・調整・検査 電子:マイクロコンピューター応用技術、電子回路設計製作技術、センサ応用 情報:計算機システムの設計、実装、テスト、運用 |
製作の目的と概要
・警備業務だけでなく複数の業務を行うことで費用対効果を高める
・本体の軽量化、及び、現状の建物で使用することで費用の低減を図る
をコンセプトに、多目的警備ロボットの開発を試みました。
ロボットの警備箇所として本校3階建のD棟を想定し、各階への移動はエレベーターを利用することとしました。また、昼間は玄関付近で待機中のロボットが、来客者に対して施設に関する案内や学生への講義に関する連絡を行います。
成果
各階へ移動するために、平行リンク機構を備えたアームの指先につけたカメラでエレベーターのボタンを探して押します。その際、ロボットの姿勢調節用として光測距センサを装備しています。その他に、障害物発見に超音波センサと不審者発見に焦電センサを備えています。ロボットは光電センサを利用して、充電ステーションにドッキングし、ステーションはAC100Vをロボット本体に供給することでバッテリの充電を開始します。ロボットはスイッチング電源を搭載しており、充電中もシステムは起動しているので、各機能への移行が可能です。