- トップ >
- データベース(職業能力開発支援情報) >
- 専門課程・応用課程課題情報検索 >
- 課題情報を検索する >
- 課題の要約
階段昇降ロボットの開発(H20)
| 大学校及び設置科 | 北陸職業能力開発大学校 生産システム技術系共同開発 |
|---|---|
| 課題実習の前提となる科目または知識、技能・技術 | 機械:機械設計技術、機械加工技術、組立技術、CAD/CAM/CAE応用技術 電子・電子:回路設計技術、電子CAD/CAM応用技術、センサ応用技術、実装技術 情報:プログラミング技術(C言語、VB)、計測・制御技術 |
| 課題に取り組む推奨段階 | 機械:機械設計製図及び精密機器製作課題実習・自動化機器製作課題実習終了後 電子:電子装置設計製作実習終了後 情報:インターフェース設計製作実習・計測制御システム構築課題終了後 |
| 課題によって養成する知識、技能・技術 | 機械:企画・設計、CAD/CAM/CAE技術、機械加工、組立・調整・検査の応用実践力 電子:信号伝送技術、制御技術、マイコン・プログラミング技術 情報:マイコン・プログラミング技術、リアルタイムマルチタスク処理技術を それぞれ身に付けます。 |
製作の目的と概要
成果
平地を走行するときには、後輪の2つのタイヤを駆動して前輪の自在キャスターを押すような形で進みます。階段昇降時には図2のようにこのキャスターを引き上げ、前輪側も十字アームの状態にして、階段を1段ずつ踏みしめるようにして上ります。また、そのときには車体が傾くので、荷物が落ちないよう自動水平機構を設けました。
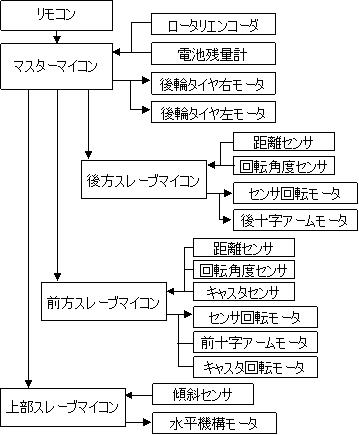
図3に示すとおり、この機体に用いているモータは、9個もあり、さらに階段との距離を測定したり機体の角度を測定したりするためのセンサを使用しているので、マスターマイコンの下にスレーブマイコンを3つ用いて制御しています。