- トップ >
- データベース(職業能力開発支援情報) >
- 専門課程・応用課程課題情報検索 >
- 課題情報を検索する >
- 課題の要約
無線LANを利用した遠隔操作ロボットの設計・製作(H18)
| 大学校及び設置科 | 沖縄職業能力開発大学校 制御技術科 |
|---|---|
| 課題実習の前提となる科目または知識、技能・技術 | 力学、安全衛生、設計・製図、測定、機械加工、材料、計測・制御、電気・電子 |
| 課題に取り組む推奨段階 | メカトロニクス実習および情報処理実習終了後 |
| 課題によって養成する知識、技能・技術 | 課題を通して、主にメカトロニクスに関する実践力を身に付ける |
製作の目的と概要
成果
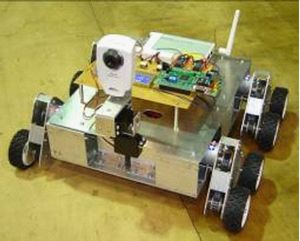
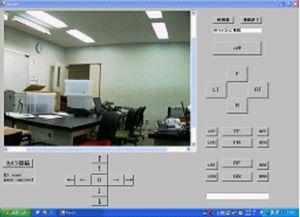
本課題では、ロボット本体に、マイコンボード(H8マイコンボード)、無線LANアクセスポイント、ネットワークカメラを搭載しました。各駆動部を独立して回転できるようにしたため、7cm程度の段差であれば乗り越えることが可能です。パソコン側の操作プログラムは、Microsoft® Visual Basic.NET®で作成し、パソコンでカメラの画像を見ながら無線LANによる遠隔操作をすることができました。