- トップ >
- データベース(職業能力開発支援情報) >
- 専門課程・応用課程課題情報検索 >
- 課題情報を検索する >
- 課題の要約
ベーゴマ玩具自動組立対戦システムの開発(H21)
| 大学校及び設置科 | 北陸職業能力開発大学校 生産システム技術系共同開発 |
|---|---|
| 課題実習の前提となる科目または知識、技能・技術 | 機械:機械設計技術、機械加工技術、組立技術、CAD/CAM/CAE応用技術 電子:電気制御回路設計技術、電子回路設計技術、電子CAD/CAM応用技術 情報:生産管理技術、画像処理技術、データベース技術、ネットワーク技術 |
| 課題に取り組む推奨段階 | 機械:機械設計製図及び精密機器製作課題実習・自動化機器製作課題実習終了後 電子:電気装置設計製作課題実習及び電子装置設計製作実習終了後 情報:インタフェース設計製作実習・計測制御システム構築課題実習終了後 |
| 課題によって養成する知識、技能・技術 | 機械は自動化システム設計技術、精密加工技術、自動化機器組立技術等、電子はセンサ技術、アクチュエータ技術、PLC制御技術等、情報は生産管理システム構築技術、ネットワークシステム構築技術等の実践力を身に付けます。 |
製作の目的と概要
成果
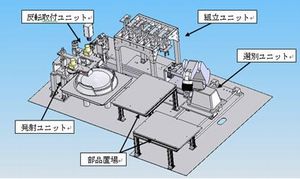
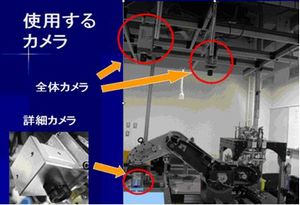
部品置き場に設置した有機ELバックパネルを用いて、部品の影を2値化し、その面積、周囲長から部品を選別します。さらに詳細撮影用カメラを用いて、部品の角度及び小径部品の色による選別を行います。
また性能評価については、2個のベーゴマを規定の発射方法を用いて発射し、ユーザーが選択した組合せの勝敗結果をデータベースにより管理します。勝敗判定は、対戦中に時間差をおいて2度撮影し、ベーゴマが1個のみ回転していることを判断した後、そのコマの軸色を認識して判定します。
ロボットの可動範囲は、下部に設置した一軸スライダを制御して拡大しています。