- トップ >
- データベース(職業能力開発支援情報) >
- 専門課程・応用課程課題情報検索 >
- 課題情報を検索する >
- 課題の要約
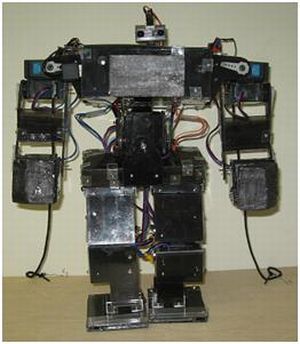
二足歩行ロボットの製作(H21)
| 大学校及び設置科 | 中国職業能力開発大学校 附属島根職業能力開発短期大学校 情報技術科 |
|---|---|
| 課題実習の前提となる科目または知識、技能・技術 | 計算機命令実習、計測制御実習、工場内ネットワーク実習、ソフトウェア制作実習、電気電子工学概論、ディジタル工学実習、情報通信工学 |
| 課題に取り組む推奨段階 | 上記「課題実習の前提」に記載している科目の修了後 |
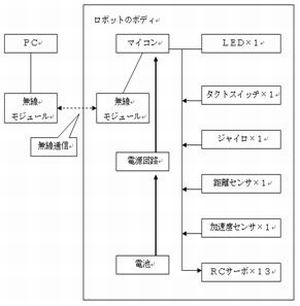
| 課題によって養成する知識、技能・技術 | 課題を通して、無線通信技術、電子回路技術、センサ活用技術、マイコン制御技術、C言語、Visual C++(R)、Visual Basic(R)などのプログラミング技術を身に付けます。 |
製作の目的と概要
成果
パソコンとロボット間の通信部分は、Zigbee(R)無線モジュールを使用し、5mくらいの距離からでも操作が可能であることを確認しました。
ロボットの歩行については、左右の足のバランスが悪く、歩行調整にかなりの時間を費やしましたが、そのおかげでロボットの重心移動についていろいろと考察することができました。