- トップ >
- データベース(職業能力開発支援情報) >
- 専門課程・応用課程課題情報検索 >
- 課題情報を検索する >
- 課題の要約
競技用歩行ロボットの製作(H21)
| 大学校及び設置科 | 中国職業能力開発大学校 附属福山職業能力開発短期大学校 制御技術科 |
|---|---|
| 課題実習の前提となる科目または知識、技能・技術 | 安全衛生、機械加工、数値制御加工、設計・製図、CAD、マイコン制御、センサ選定 |
| 課題に取り組む推奨段階 | 機械製図、力学、CAD実習、数値制御加工実習及びマイコン制御実習後 |
| 課題によって養成する知識、技能・技術 | 課題を通して、課題を通して、主にメカニズム設計及び加工技術、マイコン制御の実践力を身に付けます。 |
製作の目的と概要
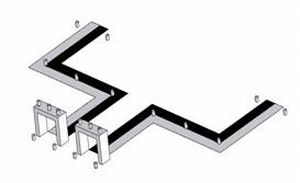
ルール上、車輪を使えない自立型の歩行ロボットであり、外部からの操作なしにゴールを目指します。コースを図1に示します。門型のゲートをくぐり、白と黒に塗り分けられた2か所のカーブがあるコースを左右それぞれ走行します。左右コースそれぞれの走行時タイムの合計が少ないロボットが勝者となります。スタートゲート付近に5つ、コース上に3つ、ゴール前に2つ、計10個の紙コップが設置されており、その紙コップを取り、保持しながらゴールに向かいます。ゴールまでにかかったタイムをコップの数で割ったタイム、例えば、60秒で完走し、コップを3つとれば、20秒という記録になります。
競技ルールに則った上で、上位入賞を目指して製作にとりかかりました。その中で、設計ノウハウおよび制御技術、機械加工技術の向上を目的としました。
成果
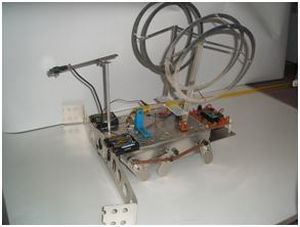
コース上のコップについては、ロボット前方にあるアームで確保、引きずりながら、取得します。
中国ブロックポリテックビジョン2010で行われたロボット競技会2足以外の部に参加しました。右コースにおいて、センサの感度調整不良による誤動作でリタイヤしたものの、左コースにおいては完走を果たし、総合で3位という成績をおさめ、特別賞をいただきました。その中で、製作した学生達はひとつのものを完成させ、動作させたときの達成感と同時にものづくりの面白さ、難しさを感じていました。