- トップ >
- データベース(職業能力開発支援情報) >
- 専門課程・応用課程課題情報検索 >
- 課題情報を検索する >
- 課題の要約
競技用ビンゴロボット製作(H21)
| 大学校及び設置科 | 北陸職業能力開発大学校 附属石川職業能力開発短期大学校 電子技術科 |
|---|---|
| 課題実習の前提となる科目または知識、技能・技術 | ロボット工学実習、電子CAD実習、コンピュータ工学実習、センサ工学、電子回路 |
| 課題に取り組む推奨段階 | 電子回路、センサ工学、電子CAD、マイコン制御の基礎を習得後推奨 |
| 課題によって養成する知識、技能・技術 | 課題を通して、ロボット制御回路及び周辺回路、プログラミングの実践力を身に付けます。 |
製作の目的と概要
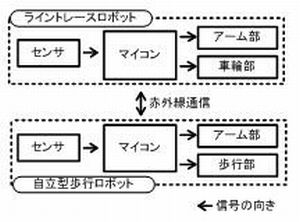
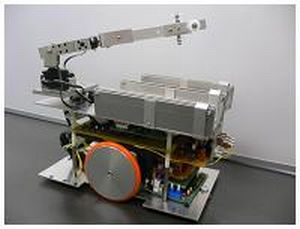
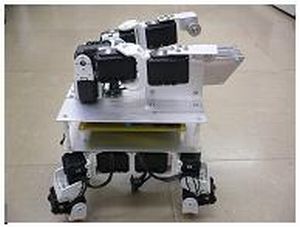
構成としては、ライントレースロボットと自立型歩行ロボットの2つの連携により、円盤を搬送し、格納場所へ円盤を格納する内容になっています。各ロボットの主な構成図については図1に示します。勝敗は格納場所にふられた番号がマス目となり縦、横、斜めのビンゴ数により決定します。今回は、ライントレース班と歩行班にわかれ、それぞれ仕様にしたがってロボット製作を行い、最後に連携して一連の流れを調整する形で進めていきました。
成果
今回のロボット製作を通じて、ものづくりの大変さ、仕上がった時の達成感、コミュニケーションの重要性を実感することができたのではないかと思います。今回の経験を活かして、今後エンジニアとしての成長を期待したいと思います。