- トップ >
- データベース(職業能力開発支援情報) >
- 専門課程・応用課程課題情報検索 >
- 課題情報を検索する >
- 課題の要約
マイクロハンドの開発(H21)
| 大学校及び設置科 | 関東職業能力開発大学校 生産システム技術系共同開発 |
|---|---|
| 課題実習の前提となる科目または知識、技能・技術 | 機械系は、機械設計技術、機械加工技術、超精密加工技術、CAD/CAM技術など。電気電子系は、PLC利用技術、プリント基板設計技術、アクチュエータ利用技術など。情報系は、画像処理、ネットワークシステム設計、統合生産管理システム、リアルタイムシステムなど。 |
| 課題に取り組む推奨段階 | 機械系、電気電子系、情報系ともに標準課題終了後 |
| 課題によって養成する知識、技能・技術 | 課題を通して、従来の加工環境とは異った先端技術である超精密加工技術ならびに微小領域での材料の挙動、併せて「ものづくり」の全工程の生産管理を主体的に行う複合化した技術、技能及びその活用能力の実践力を身に付けます。 |
製作の目的と概要
?0.1 mm立方の対象物を保持・移動・置く
?装置のスムーズな動作
?装置の小型化
?動作の自動化
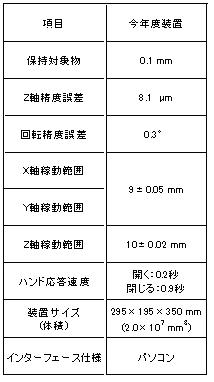
成果
装置は機構部・ステージ部・ハンド部・観察部の4部で構成されていますが、それぞれの動作精度が表1に示すように通常の精度と比較すると高精度であるために、確実な動作とその検証には苦労を要しました。
微小な物体を保持するためには通常では考えることの無い問題、たとえば環境の清浄度や静電気の対策など多くのことを学生は学ぶことができました。