- トップ >
- データベース(職業能力開発支援情報) >
- 専門課程・応用課程課題情報検索 >
- 課題情報を検索する >
- 課題の要約
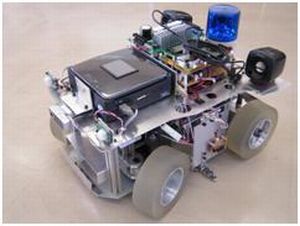
無人陸上車両(UGV: Unmanned Ground Vehicle)の開発(H21)
| 大学校及び設置科 | 九州職業能力開発大学校 生産システム技術系共同開発 |
|---|---|
| 課題実習の前提となる科目または知識、技能・技術 | 共通:安全衛生管理、生産管理、品質管理・機械:CAD/CAM、機械設計、精密加工、計測制御、自動化機器・電子:アナログ回路、デジタル回路、センサ応用、電力変換・情報:ネットワークシステム、画像計測、データベース |
| 課題に取り組む推奨段階 | 課題の前提となる科目の学科及び実技の修了後 |
| 課題によって養成する知識、技能・技術 | 課題を通して専門的知識や技能・技術といったテクニカルスキルの向上を図るとともに、ヒューマンスキルやコンセプチャルスキルの向上を図ります。 |
製作の目的と概要
そこで、本開発では被災地に救助車両等がある程度まで接近したのち、被災状況を事前に調査するために、危険区域と想定される周辺100m程度を調査することを目的としました。
成果
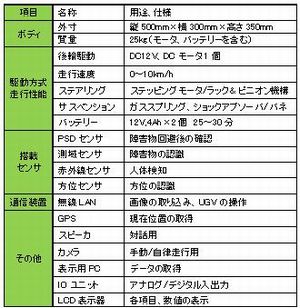
UGVは500×300×350mmの小型四輪車両で、30分程度の連続運転が可能です。本体には通信装置や各種センサを搭載しており、以下の内容が可能です。
?手動遠隔操作
?カメラによる災害状況の確認
?センサによる障害物の確認
?音声による呼びかけや会話
?センサによる熱の検知
?GPSによる現在地確認
手動操作はカメラ画像を見ながら表示用PCのジョイスティックで行います。
現在は半径50m程度の手動遠隔操作が可能となっており、今後は目的地までの自動走行が課題となっています。