- トップ >
- データベース(職業能力開発支援情報) >
- 専門課程・応用課程課題情報検索 >
- 課題情報を検索する >
- 課題の要約
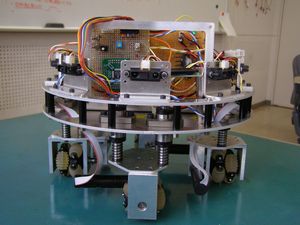
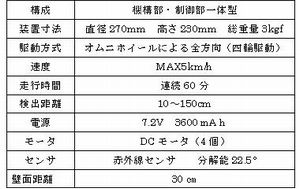
全方向移動ロボットの開発(H21)
| 大学校及び設置科 | 九州職業能力開発大学校 生産システム技術系共同開発 |
|---|---|
| 課題実習の前提となる科目または知識、技能・技術 | 電子回路、マイコン技術、プログラミング、インターフェイス技術、CAD/CAM技術、機構設計技術、加工技術 |
| 課題に取り組む推奨段階 | 応用課程2年次 |
| 課題によって養成する知識、技能・技術 | 課題を通して、電子は電子回路設計技術、センサー計測技術、モータ駆動技術、アルゴリズム構築、検証技術等を機械は機械加工技術、CAD/CAM技術、駆動メカニズム設計技術等の実践的な技術を身に付けます。 |
製作の目的と概要
成果