- トップ >
- データベース(職業能力開発支援情報) >
- 専門課程・応用課程課題情報検索 >
- 課題情報を検索する >
- 課題の要約
マイクロマウスの製作(H21)
| 大学校及び設置科 | 中国職業能力開発大学校 電子技術科 |
|---|---|
| 課題実習の前提となる科目または知識、技能・技術 | 電子回路設計・製作、マイコンプログラミング、センサ・モータ制御 |
| 課題に取り組む推奨段階 | 電子回路設計・製作技術、マイコンプログラミング技術、センサ・モータ制御技術終了後 |
| 課題によって養成する知識、技能・技術 | 課題を通して、主に電子回路設計・製作技術、マイコンプログラミング技術の実践力を身に付けます。 |
製作の目的と概要
本課題では、競技会に出場できるレベルを目標にして、マイクロマウスを製作しました。また、製作過程である電子回路設計・製作、制御プログラム作成を通して、「ものづくり」の技能向上を目的として取り組みました。
成果
ハードウェアは、検出部となるセンサ回路基板、制御部となるCPU回路基板、駆動部となるモータ制御回路基板の3つで構成されており、それぞれ担当を決めて製作しました。製作と動作検証を繰り返し正常に動作することを確認してから、各回路基板を組み合わせてハードウェアを完成させました。
ソフトウェアは、まず基本動作である1区画走行、90度回転、180度回転をモータ制御プログラムの応用でプログラムを作成し、動作確認を行いました。
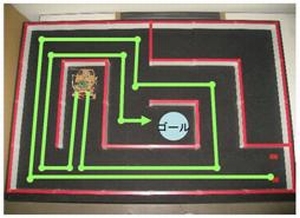
本格的に迷路を走行するには、走行中のずれを補正しながら迷路の中心を走行させるための姿勢制御、走行しながら決められたゴールまでの最短ルートを算出する迷路探索が必要です。特に、迷路探索プログラムは学生たちが独自で考え出したアルゴリズムを元に作成しました。1回目の走行でゴールまでの最短経路を算出し、2回目の走行で求めた最短経路でゴールまでたどり着くことができました。本課題の結果として、迷路が6×4区画であること、確実に動作させるため、走行速度はあまり速くしていないことから目標の競技会レベルには達しませんでした。しかし、本課題によりCPU、センサ、モータ制御など「ものづくり」の技術・技能の向上につながったのではないかと思っています。