- トップ >
- データベース(職業能力開発支援情報) >
- 専門課程・応用課程課題情報検索 >
- 課題情報を検索する >
- 課題の要約
櫓漕ぎロボットソーラー和船の製作(H18)
| 大学校及び設置科 | 近畿職業能力開発大学校 附属滋賀職業能力開発短期大学校 電子技術科 |
|---|---|
| 課題実習の前提となる科目または知識、技能・技術 | パワーエレクトロニクス技術、マイコン制御 |
| 課題に取り組む推奨段階 | マイコン・インタフェース技術、パワーエレクトロニクス技術、無線通信技術、プログラミング技術などの基礎を習得した段階 |
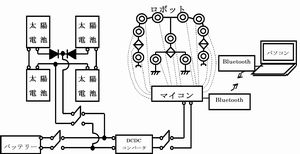
| 課題によって養成する知識、技能・技術 | 人型ロボット、太陽電池、ワンチップマイコン |
製作の目的と概要
一方、近江八幡には水郷めぐりと呼ばれる観光和船があります。現在では、エンジンによるプロペラモータを使った運行が主ですが、櫓とよばれる一本の棒を人力で動かすことにより推力を得る技術は、速度は遅いですが、騒音や排ガスが無いことや漕ぎ手の動作がユニークであることから観光客に高い人気があります。この2つの技術に着目して、櫓漕ぎロボットソーラー和船の製作を行ないました。
成果