- トップ >
- データベース(職業能力開発支援情報) >
- 専門課程・応用課程課題情報検索 >
- 課題情報を検索する >
- 課題の要約
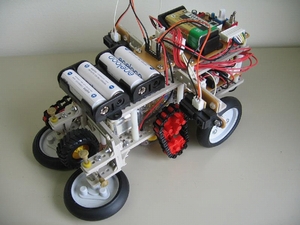
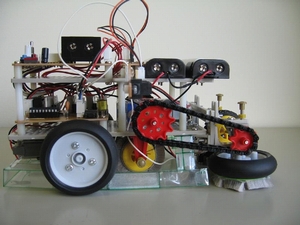
掃除ロボットの製作(H22)
| 大学校及び設置科 | 関東職業能力開発大学校 附属千葉職業能力開発短期大学校 電子情報技術科 |
|---|---|
| 課題実習の前提となる科目または知識、技能・技術 | センサ工学、マイクロコンピュータ工学実習、インターフェース製作実習、組込み機器製作実習 |
| 課題に取り組む推奨段階 | 組込み機器製作実習の実習が半分程度過ぎた段階 |
| 課題によって養成する知識、技能・技術 | 課題を通して、習得した技術、技能を組み合わせて使用する応用力を身につけます。 |
製作の目的と概要
様々なタイプのものがありますが、今回の実習課題では、他の実習授業の中で製作したライントレーサーを応用し、付加機能を持たせることにより、掃除ロボットとして製作しました。
また、他の座学や実習の授業で学んだ各種センサやマイコンのプログラミングの知識を活かすことができるので、2年間の集大成のテーマとなったと考えています。
成果
清掃の走行パターンのバリエーションを複数にすることもできたのですが、まずは、基本的な走行と、障害物の回避、清掃ブラシによるゴミの確実な回収が行えるように作り上げることで、製品を段階的に設計し、1つの段階が完成したら、次の段階進むという企業のモノづくりの基本スタンスを身につけることができたのではないかと考えます。