- トップ >
- データベース(職業能力開発支援情報) >
- 専門課程・応用課程課題情報検索 >
- 課題情報を検索する >
- 課題の要約
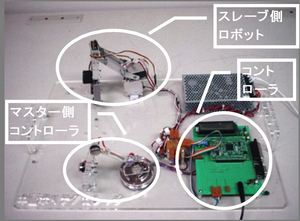
マスタースレーブ式ハンドリングロボットの製作(H22)
| 大学校及び設置科 | 中国職業能力開発大学校 制御技術科 |
|---|---|
| 課題実習の前提となる科目または知識、技能・技術 | 機械加工実習、機械工作実習、CAD実習、電子工学実習、メカトロニクス実習、マイコン制御実習 |
| 課題に取り組む推奨段階 | メカトロニクス実習終了後 |
| 課題によって養成する知識、技能・技術 | 組立・調整技術、機械加工技術、電子回路製作技術、C言語によるプログラミング技術などの実践力を身につけます。 |
製作の目的と概要
平成20年から岡山県下のロボット操作・体験イベント(財団法人岡山県産業振興財団主催「おもしろ体験DAY」)において、小中学生等の子供達に小形ブロックの積み上げ操作体験用ロボットとして出展してきました。
これまでのイベント出展の経験からハンドリングロボットの可動性や操作性に問題があったため、それらを改良したハンドリングロボットの製作に取り組みました。
成果