- トップ >
- データベース(職業能力開発支援情報) >
- 専門課程・応用課程課題情報検索 >
- 課題情報を検索する >
- 課題の要約
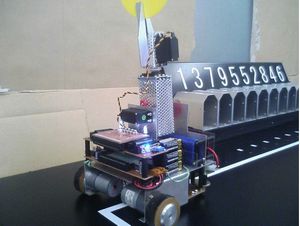
CD搬送用ロボットの製作(H18)
| 大学校及び設置科 | 九州職業能力開発大学校 附属川内職業能力開発短期大学校 電子技術科 |
|---|---|
| 課題実習の前提となる科目または知識、技能・技術 | アクチュエータ技術、センサ技術、マイコン制御 |
| 課題に取り組む推奨段階 | アクチュエータ技術、マイコン・インタフェース技術、プログラミング技術などの基礎を習得した段階 |
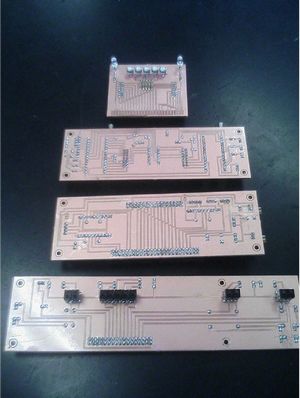
| 課題によって養成する知識、技能・技術 | 課題を通して、必要な部品の選定方法、回路基盤の設計・製作、ワンチップマイコンや光センサの使用方法・プログラミング技術を身に付ける |
製作の目的と概要
成果
アーム部では前年度はステッピングモータで制御していましたが、RCサーボモータを用いて制御することにより正確性、トルクの向上を実現しました。
ライントレース部では、センサ位置を前に、アーム位置を後ろにすることで、ほぼ止まらずにCDを取ることができました。また、モータドライブICを変え、モータに供給する電圧を前年度の約7Vから15Vまで上げることができ、速度面でも大幅に高速化を実現しました。しかし高速化したロボットの制御は、モータに供給する電圧やセンサ感度、アーム駆動時のノイズなどで困難を極めました。
プログラムはアセンブラ言語を用いてプログラミングを行ないました。ここで、コースをショートカットするプログラムを製作し、ビンゴまでの時間を短縮させました。ショートカット処理を入れた時、ビンゴ完成タイムは19秒台を記録しました。これは前年度優勝者のタイムを大幅に更新した値となりました。