- トップ >
- データベース(職業能力開発支援情報) >
- 専門課程・応用課程課題情報検索 >
- 課題情報を検索する >
- 課題の要約
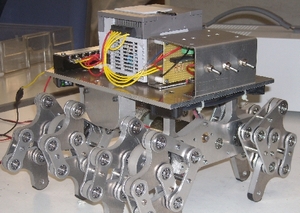
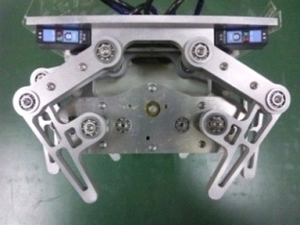
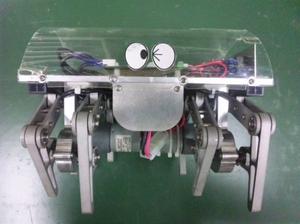
八足歩行ロボットの設計・製作(H22)
| 大学校及び設置科 | 職業能力開発総合大学校 小平キャンパス 生産技術科 |
|---|---|
| 課題実習の前提となる科目または知識、技能・技術 | 安全衛生、機械製図、機械加工実習、CAD実習、CAD/CAM実習、数値制御加工実習、精密加工実習、製作実習、電気工学実験、シーケンス制御実習 |
| 課題に取り組む推奨段階 | 3次元CAD実習が終了し、メカのハードが完成に近づいたころにシーケンス制御実習の基礎編が終了している段階。 |
| 課題によって養成する知識、技能・技術 | 課題を通して、主に3次元CADによる機構設計、CAD/CAM関連技術による機械加工およびシーケンス制御関連の実践力を身に付けます。 |
製作の目的と概要
このロボットは、左右二つのモータにより発生した動力を、歯車で各脚へ伝達し脚を駆動させています。脚部は電子制御を用いないで駆動させるために、リンク機構を採用しました。自力で姿勢を保つために、八本の脚のうち同時に三本以上の足が接地します。今回は「メカタマ」の脚部の機構をCADを用いた機構解析により検証し、問題点をあげ、その問題を解決し得る足を設計・製作しました。また、PLCとセンサにより、障害物の回避などの簡単な動きを、モータの正転・逆転を使って自律して行えるものにしました。
成果