- トップ >
- データベース(職業能力開発支援情報) >
- 専門課程・応用課程課題情報検索 >
- 課題情報を検索する >
- 課題の要約
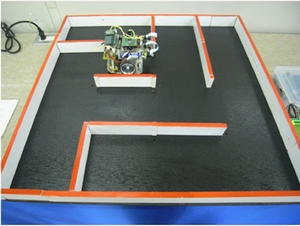
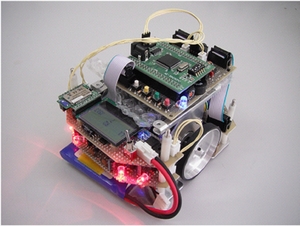
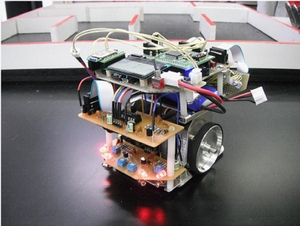
競技用ロボット「マイクロマウス」の製作(H22)
| 大学校及び設置科 | 北陸職業能力開発大学校 附属石川職業能力開発短期大学校 電子情報技術科 |
|---|---|
| 課題実習の前提となる科目または知識、技能・技術 | 電子回路、センサ工学、インターフェース製作実習、電子回路設計製作実習、マイクロコンピュータ工学実習 |
| 課題に取り組む推奨段階 | 電子回路、センサ工学、電子回路設計・製作、マイコン制御の基礎を習得後推奨 |
| 課題によって養成する知識、技能・技術 | ロボット制御回路及びマイコン周辺回路、制御プログラミングの基礎力と実践力 |
製作の目的と概要
マイクロマウスの製作を通して、マイクロコンピュータの周辺技術をはじめ、確実に迷路を走行するためのアルゴリズム、迷路の状況を認識するセンサ回路、走行や姿勢制御にともなうモーター制御技術など組込み全般に関する技術を習得することができます。また、ものづくりの楽しさと、困難に挑戦するためのチャレンジ精神、目的を達成するために必要な忍耐力を養い、ものづくりに必要な総合的実践力を身に付けることを目的としています。
成果