- トップ >
- データベース(職業能力開発支援情報) >
- 専門課程・応用課程課題情報検索 >
- 課題情報を検索する >
- 課題の要約
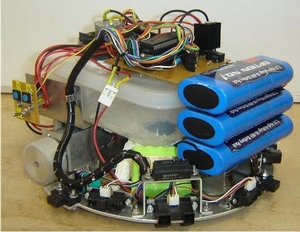
自動走行型掃除機の設計・製作(H22)
| 大学校及び設置科 | 沖縄職業能力開発大学校 制御技術科 |
|---|---|
| 課題実習の前提となる科目または知識、技能・技術 | 安全衛生、メカニズム、電気工学、電子工学、機械設計・製図、CAD実習、機械加工、センサ工学、マイコン制御、メカトロニクス |
| 課題に取り組む推奨段階 | メカニズム、電気工学、電子工学、マイコン制御、CAD実習終了後 |
| 課題によって養成する知識、技能・技術 | 課題を通して主に、機械設計、CAD、マイコン制御の実践力を身に付けます。 |
製作の目的と概要
今回の総合制作実習では、市販されている自動掃除機を参考に、自動走行型掃除機を製作することとし、今までに習得したマイコン制御、センサ、アクチュエータ等各種制御機器の知識、および機械設計、機械加工の技術を深めることを目的としました。
市販されている自動掃除機は、掃除機能以外にも様々な機能が搭載されていますが、製作する掃除機は、障害物を回避しながら掃除をおこなう機能のみとしました。
成果
機体は円状にし、回転時に障害物に接触しても支障がないようにしました。走行用駆動にDCギヤードモータを2個使用し、機体前方には、障害物や壁を検知させるための測距センサと段差を検知させるためのフォトセンサを取り付けました。
集塵機構は、ポリスチレン製のタッパを使用して集塵庫とし、その蓋に直径65[mm]のファンとDCモータを取り付け、またその底面に、長さ150[mm]、幅10[mm]の集塵口を取り付けました。この集塵口を本体中央の吸い取り口に合わせるように集塵庫を本体に取り付け、集塵口からごみを吸い上げるようにしました。また、集塵口後方にローラーブラシを取り付け、ごみをかき集められるようにしました。マイコンはPIC16F877を使用しました。
2000[mm]四方の空間で実験をおこなったところ、約4分で大体のごみ(今回は15[mm]四方の紙片)を吸い取ることができましたが、センサの感度の影響で壁際のごみが残ってしまいました。