- トップ >
- データベース(職業能力開発支援情報) >
- 専門課程・応用課程課題情報検索 >
- 課題情報を検索する >
- 課題の要約
自動化システムの構築(H22)
| 大学校及び設置科 | 近畿職業能力開発大学校 制御技術科 |
|---|---|
| 課題実習の前提となる科目または知識、技能・技術 | 機械設計製図、機械加工、力学、メカニズム、シーケンス制御、空気圧制御、安全衛生 |
| 課題に取り組む推奨段階 | 上記の内容終了後 |
| 課題によって養成する知識、技能・技術 | 課題を通じて、機械装置の設計・組立・調整能力・プログラミング・保全等の自動化システムに関する実践力を身につけます。 |
製作の目的と概要
本課題では、技能五輪でも実際に使用されている自動化装置をベースにして、自動化システムの設計・組立・調整能力・プログラミング・保全技術等を向上させることを目的として自動化システムの構築に取り組みました。
成果
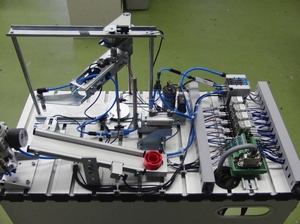
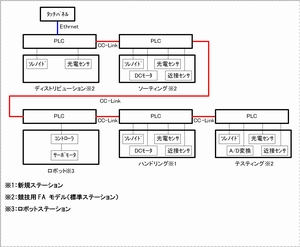
本課題では、技能五輪用課題をベースに、新規ステーション(ハンドリングステーション)の製作と自動化システムの構築を行いました。
新たに製作したハンドリングステーションには、該当する位置へワークの供給を行う役割があり、高さ調整を行う昇降駆動部とワークピースの取扱いを行う吸着部によって構成されています。また、昇降駆動部には、送りねじを用いたパルス検出による位置検出を行っており、位置精度1.5[mm]、昇降速度13[mm/s]となっています。
この課題製作を通じて、自動化システムにおける要素の特徴と相互関係を理解しながら、各要素の選定や使用法を学び、目的であった自動化システムの設計・組立・調整能力・プログラミング・保全技術等を向上することができたと考えます。