- トップ >
- データベース(職業能力開発支援情報) >
- 専門課程・応用課程課題情報検索 >
- 課題情報を検索する >
- 課題の要約
遠隔操作ロボットの製作(H22)
| 大学校及び設置科 | 中国職業能力開発大学校 附属島根職業能力開発短期大学校 電子情報技術科 |
|---|---|
| 課題実習の前提となる科目または知識、技能・技術 | マイクロコンピュータ工学 情報通信工学 電子回路設計製作実習 センサ工学 |
| 課題に取り組む推奨段階 | マイクロコンピュータ工学 情報通信工学 電子回路設計製作実習 終了後 |
| 課題によって養成する知識、技能・技術 | マイコン制御、センサ技術、モータ制御、無線LAN、組込み技術等の応用的な技術を身につけます。 |
製作の目的と概要
製作物の概要は、ステッピングモータ付きのロボット(図1)をパソコンから遠隔操作するというものであり、車体に取り付けてあるWebカメラの画像を見ながら、前進、後退、左右旋回の指令をロボットに送り操縦します。
成果
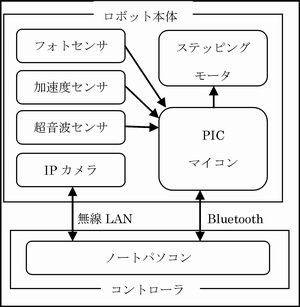
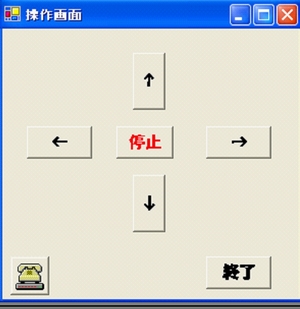
ロボットの構成を図2に示します。IPカメラの映像は無線LAN(IEEE802.11g)を使用し、無線LANを使用するうえでの基本設定とセキュリティの設定を行っています。ロボットとパソコン間の操作指令は、シリアル通信を無線化するシリアルポートプロファイルを搭載しているBluetooth○Rモジュールを使用し、無線での通信を行っています。操作画面はVisual Basic®で製作しています。マイコンは授業で使用したPIC○Rマイコンを使用し、ノートパソコンからの操作指令に合わせてステッピングモータを制御しています。その他、このロボットには後方の障害物を検知する超音波センサ、前後の段差を検知するフォトインタラプタ、坂道を検出しステッピングモータの相励磁を変化させるために加速度センサなどを取り付けており、センサの勉強もさせています。車体はプリント基板で製作しており、回路基板をCADで製作しています。